
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
This is the bag file which I'm create in my robot: C:\fakepath\mydata01.bag
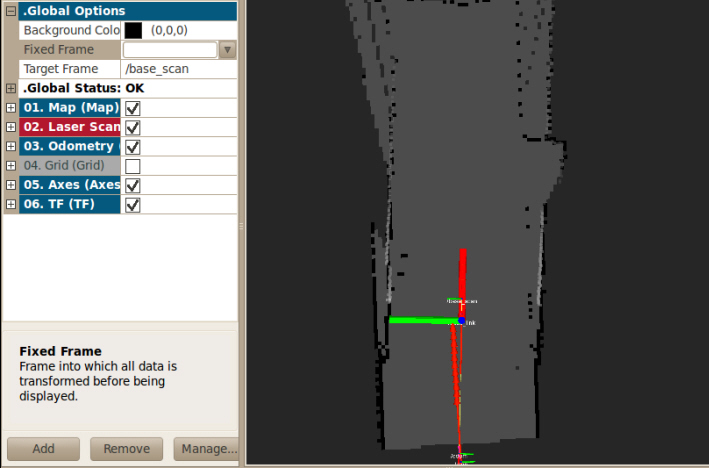
This is the map in Rviz.
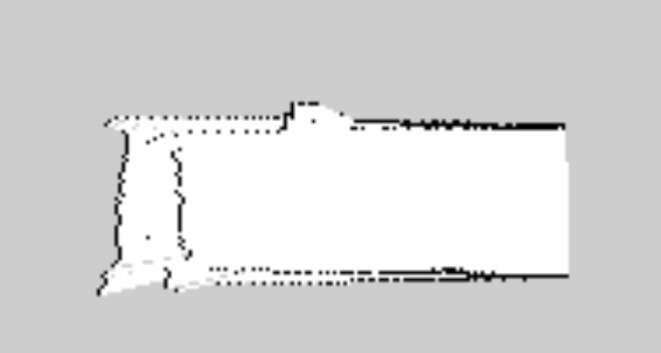
This is the map which replay used the bag file.
| | 2 | No.2 Revision |
This is the bag file which I'm create in my robot: https://skydrive.live.com/?cid=be9affb6b505ae53&sc=documents#!/?cid=be9affb6b505ae53&permissionsChanged=1&id=BE9AFFB6B505AE53%21115 C:\fakepath\mydata01.bag(the file is about 15M, after several time to upload failed I put the file in skydrive.)
This is the map in Rviz.
This is the map which replay used the bag file.
| | 3 | No.3 Revision |
This is the bag file which I'm create in my robot: https://skydrive.live.com/?cid=be9affb6b505ae53&sc=documents#!/?cid=be9affb6b505ae53&permissionsChanged=1&id=BE9AFFB6B505AE53%21115the bag file
(the file is about 15M, after several time to upload failed I put the file in skydrive.)
This is the map in Rviz.
This is the map which replay used the bag file.
| | 4 | No.4 Revision |
This is the bag file which I'm create in my robot: the bag file https://skydrive.live.com/?cid=be9affb6b505ae53&sc=documents#!/?cid=be9affb6b505ae53&permissionsChanged=1&id=BE9AFFB6B505AE53%21115
(the file is about 15M, after several time to upload failed I put the file in skydrive.)
This is the map in Rviz.
This is the map which replay used the bag file.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.