
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
lookupTransform() is a lower level method which returns the transform between two coordinate frames.
In below code nothing is calculated, just reading the transform between frames "base_footprint", "odom_combined"
As per your above description, odom_combined fame similar to world frame and base_footprint is similar to odom .
//record the starting transform from the odometry to the base frame
listener_.lookupTransform("base_footprint", "odom_combined",
ros::Time(0), start_transform);
| | 2 | No.2 Revision |
lookupTransform() is a lower level method which returns the transform between two coordinate frames.
In below code nothing is calculated, just reading the transform between frames "base_footprint", "odom_combined"
As per your above description, odom_combined fame similar to world frame and base_footprint is similar to odom .
//record the starting transform from the odometry to the base frame
listener_.lookupTransform("base_footprint", "odom_combined",
ros::Time(0), start_transform);
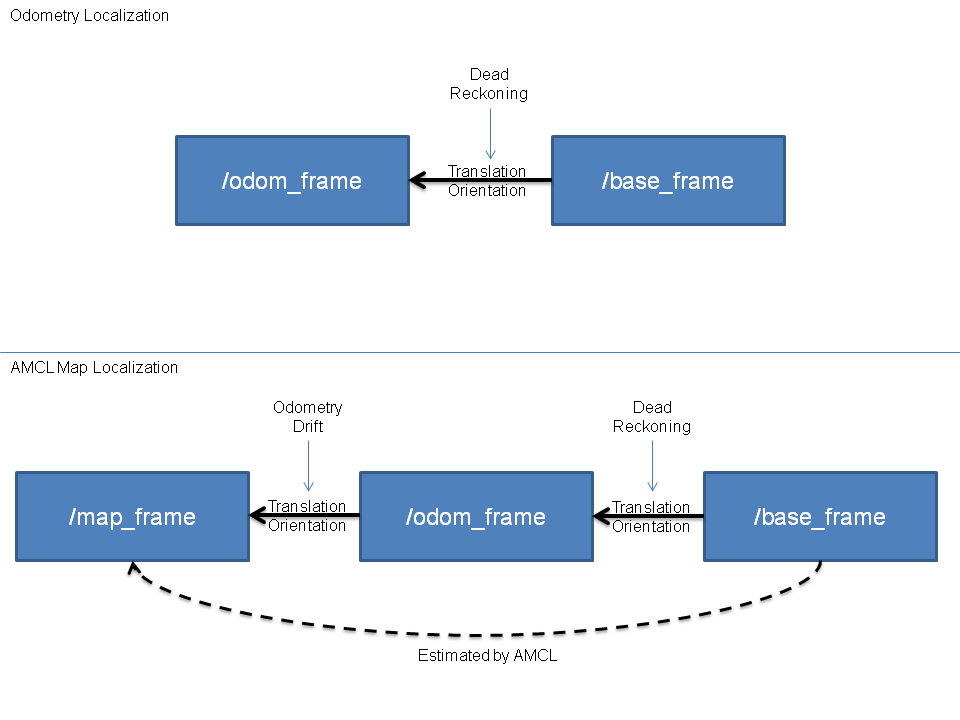
Image from amcl page may give you idea of frames
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
