
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I did a lot of different gmapping experiments - results can be found here.
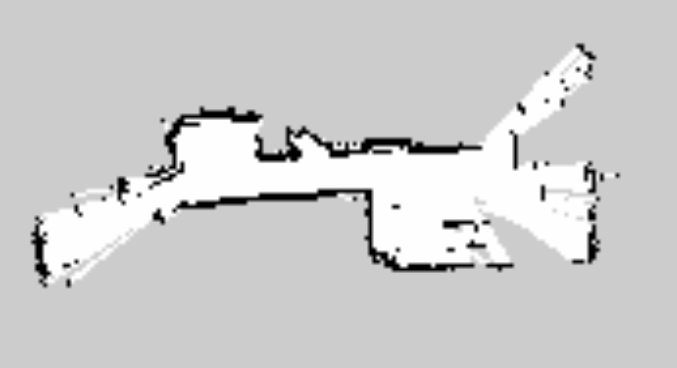
I had most success with setting the minimumScore to a very high value, as suggested here, and combining that with setting srr/srt/str to 0, and stt to 0.1 (to reflect rotational error, but near-perfect translational behavior), i.e.:
rosrun gmapping slam_gmapping scan:=scan _delta:=0.1 _maxUrange:=4.99 _xmin:=-5.0 _ymin:=-5.0 _xmax:=5.0 _ymax:=5.0 _particles:=30 _srr:=0 _srt:=0 _str:=0 _stt:=0.1 _minimumScore:=10000
(Note that the maxUrange, and particles values are the defaults; the xmin/ymin/xmax/ymax just make for a smaller map, by specifying much lower starting values than the default 100m)
The result is this (pgm):

Note that results change across runs - sometimes results would be slightly worse. In particular, the "_srr:=0 _srt:=0 _str:=0 _stt:=0.1" seems not very significant - with the all these set to 0, and particles set to 1, that is with:
rosrun gmapping slam_gmapping scan:=scan _delta:=0.1 _maxUrange:=4.99 _xmin:=-5.0 _ymin:=-5.0 _xmax:=5.0 _ymax:=5.0 _particles:=1 _srr:=0 _srt:=0 _str:=0 _stt:=0 _minimumScore:=10000
I get this (pgm):
Slightly different, but well within the variance I get by running the previous command.
So this seems to solve my issue. I am still open to better solutions though, as this seems a bit of a hack, disabling a large part of gmapping's 'intelligence'.
| | 2 | No.2 Revision |
I did a lot of different gmapping experiments - results can be found here.
I had most success with setting the minimumScore to a very high value, as suggested here, and combining that with setting srr/srt/str to 0, and stt to 0.1 (to reflect rotational error, but near-perfect translational behavior), i.e.:
rosrun gmapping slam_gmapping scan:=scan _delta:=0.1 _maxUrange:=4.99 _xmin:=-5.0 _ymin:=-5.0 _xmax:=5.0 _ymax:=5.0 _particles:=30 _srr:=0 _srt:=0 _str:=0 _stt:=0.1 _minimumScore:=10000
(Note that the maxUrange, and particles values are the defaults; the xmin/ymin/xmax/ymax just make for a smaller map, by specifying much lower starting values than the default 100m)
The result is this (pgm):
Note that results change across runs - sometimes results would be slightly worse.
In particular, the "_srr:=0 "_srr:=0 _srt:=0 _str:=0 _stt:=0.1" _stt:=0.1" seems not very significant - with the all these set to 0, and particles set to 1, that is with:
rosrun gmapping slam_gmapping scan:=scan _delta:=0.1 _maxUrange:=4.99 _xmin:=-5.0 _ymin:=-5.0 _xmax:=5.0 _ymax:=5.0 _particles:=1 _srr:=0 _srt:=0 _str:=0 _stt:=0 _minimumScore:=10000
I get this (pgm):
Slightly different, but well within the variance I get by running the previous command.
Lastly, by simply using the defaults for srr/srt/str/stt, i.e.:
rosrun gmapping slam_gmapping scan:=scan _delta:=0.1 _maxUrange:=4.99 _xmin:=-5.0 _ymin:=-5.0 _xmax:=5.0 _ymax:=5.0 _minimumScore:=10000
I get this (pgm):

Again slightly different, but well in line with what I get by running the first command.
So this seems to solve my issue. I am still open to better solutions though, as this seems a bit of a hack, disabling a large part of gmapping's 'intelligence'.
| | 3 | No.3 Revision |
I did a lot of different gmapping experiments - results can be found here.
Summary of what I tried that did NOT help:
Summary of what did help:
I had most success with setting the minimumScore to a very high value, as suggested here, and combining that with setting srr/srt/str to 0, and stt to 0.1 (to reflect rotational error, but near-perfect translational behavior), i.e.:
rosrun gmapping slam_gmapping scan:=scan _delta:=0.1 _maxUrange:=4.99 _xmin:=-5.0 _ymin:=-5.0 _xmax:=5.0 _ymax:=5.0 _particles:=30 _srr:=0 _srt:=0 _str:=0 _stt:=0.1 _minimumScore:=10000
(Note that the maxUrange, and particles values are the defaults; the xmin/ymin/xmax/ymax just make for a smaller map, by specifying much lower starting values than the default 100m)
The result is this (pgm):
Note that results change across runs - sometimes results would be slightly worse. In particular, the "_srr:=0 _srt:=0 _str:=0 _stt:=0.1" seems not very significant - with all these set to 0, and particles set to 1, that is with:
rosrun gmapping slam_gmapping scan:=scan _delta:=0.1 _maxUrange:=4.99 _xmin:=-5.0 _ymin:=-5.0 _xmax:=5.0 _ymax:=5.0 _particles:=1 _srr:=0 _srt:=0 _str:=0 _stt:=0 _minimumScore:=10000
I get this (pgm):
Slightly different, but well within the variance I get by running the previous command.
Lastly, by simply using the defaults for srr/srt/str/stt, i.e.:
rosrun gmapping slam_gmapping scan:=scan _delta:=0.1 _maxUrange:=4.99 _xmin:=-5.0 _ymin:=-5.0 _xmax:=5.0 _ymax:=5.0 _minimumScore:=10000
I get this (pgm):
Again slightly different, but well in line with what I get by running the first command.
So in summary, changing minimumScore to a very large value solves my problem. (I tried 500, 750, 1000, 10 000, with 10 000 best)
So this seems to solve my issue. I am still open to better solutions though, as this seems a bit of a hack, disabling a large part of gmapping's 'intelligence'.
| | 4 | No.4 Revision |
I did a lot of different gmapping experiments - results can be found here.
Summary of what I tried that did NOT help:
Summary of what did help:
I had most success with setting the minimumScore to a very high value, as suggested here, and combining that with setting srr/srt/str to 0, and stt to 0.1 (to reflect rotational error, but near-perfect translational behavior), i.e.:
rosrun gmapping slam_gmapping scan:=scan _delta:=0.1 _maxUrange:=4.99 _xmin:=-5.0 _ymin:=-5.0 _xmax:=5.0 _ymax:=5.0 _particles:=30 _srr:=0 _srt:=0 _str:=0 _stt:=0.1 _minimumScore:=10000
(Note that the maxUrange, and particles values are the defaults; the xmin/ymin/xmax/ymax just make for a smaller map, by specifying much lower starting values than the default 100m)
The result is this (pgm):
Note that results change across runs - sometimes results would be slightly worse. In particular, the "_srr:=0 _srt:=0 _str:=0 _stt:=0.1" seems not very significant - with all these set to 0, and particles set to 1, that is with:
rosrun gmapping slam_gmapping scan:=scan _delta:=0.1 _maxUrange:=4.99 _xmin:=-5.0 _ymin:=-5.0 _xmax:=5.0 _ymax:=5.0 _particles:=1 _srr:=0 _srt:=0 _str:=0 _stt:=0 _minimumScore:=10000
I get this (pgm):
Slightly different, but well within the variance I get by running the previous command.
Lastly, by simply using the defaults for srr/srt/str/stt, i.e.:
rosrun gmapping slam_gmapping scan:=scan _delta:=0.1 _maxUrange:=4.99 _xmin:=-5.0 _ymin:=-5.0 _xmax:=5.0 _ymax:=5.0 _minimumScore:=10000
I get this (pgm):
Again slightly different, but well in line with what I get by running the first command.
So in summary, changing minimumScore to a very large value solves my problem. (I tried 500, 750, 1000, 10 000, with 10 000 best)
So this seems to solve my issue. I am still open to better solutions though, as this seems a bit of a hack, disabling a large part of gmapping's 'intelligence'.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.