
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I have edited my launch file to this:
<!-- Start the Kinect (openni_camera) -->
<group if="$(arg Kinect)">
<include file="$(find openni_launch)/launch/openni.launch">
<arg name="camera" value="kinect" />
</include>
</group>
You must configure the following:
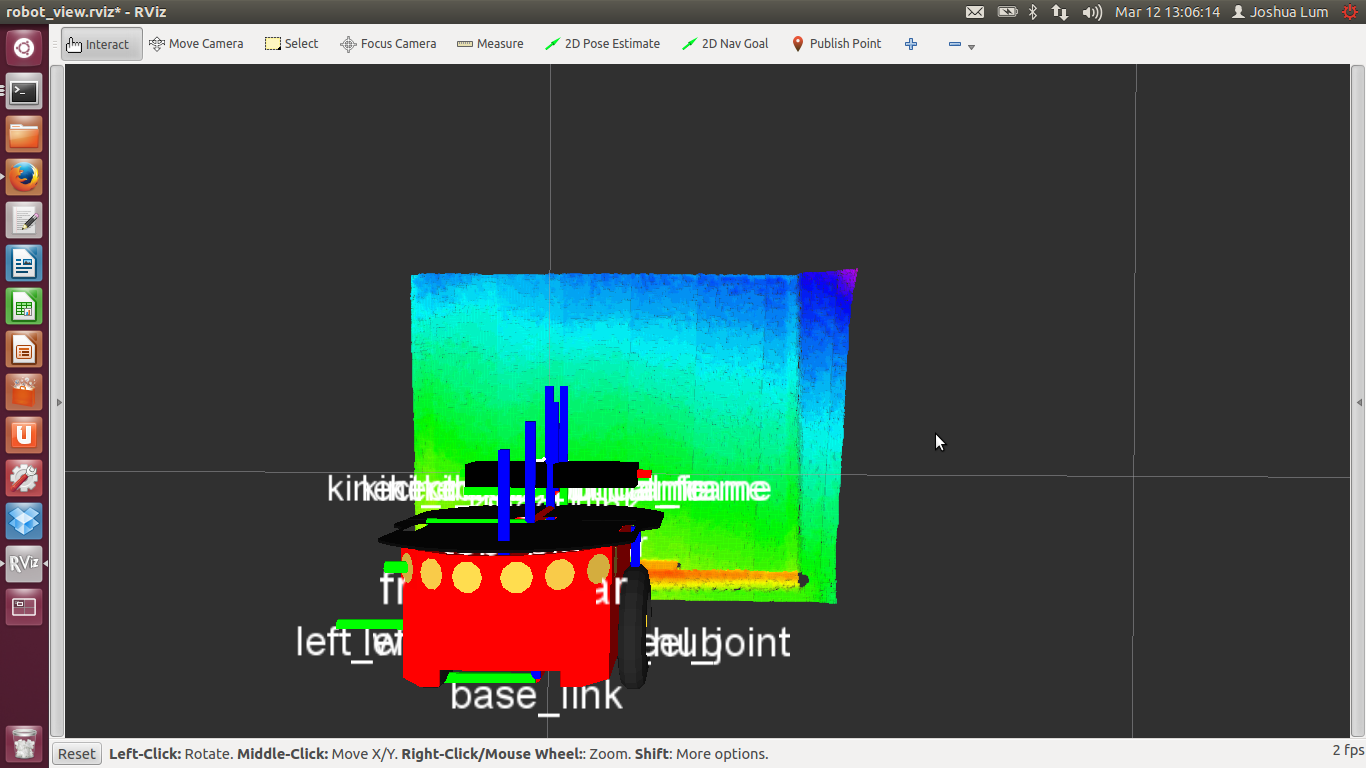
Which put the PointCloud2 data in the correct position relative to the robot:
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
