
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Hi,
When the generated clouds are empty, it may because the intrinsic parameters (focals) of camera_info are wrong or the depth image format is not standard (rtabmap wants 16bits unsigned short = mm or 32bits float = meters). For example, if you have distance in mm in float format, the point cloud will be 1000x bigger. By default, cloud_max_depth is 4 meters. You could try to set
cloud_max_depth to 0 to see if the clouds can be generated (even if the calibration is wrong).
cheers
| | 2 | No.2 Revision |
Hi,
When the generated clouds are empty, it may because the intrinsic parameters (focals) of camera_info are wrong or the depth image format is not standard (rtabmap wants 16bits unsigned short = mm or 32bits float = meters). For example, if you have distance in mm in float format, the point cloud will be 1000x bigger. By default, cloud_max_depth is 4 meters. meters (thus filtering all points of the previous case). You could try to set
cloud_max_depth to 0 to see if the clouds can be generated (even if the calibration is wrong).
cheers
| | 3 | No.3 Revision |
Hi,
When the generated clouds are empty, it may because the intrinsic parameters (focals) of camera_info are wrong or the depth image format is not standard (rtabmap wants 16bits unsigned short = mm or 32bits float = meters). For example, if you have distance in mm in float format, the point cloud will be 1000x bigger. By default, cloud_max_depth is 4 meters (thus filtering all points of the previous case). You could try to set
cloud_max_depth to 0 (filtering disabled) to see if the clouds can be generated (even if the calibration is wrong).
cheers
| | 4 | No.4 Revision |
Hi,
When the generated clouds are empty, it may because the intrinsic parameters (focals) of camera_info are wrong or the depth image format is not standard (rtabmap wants 16bits unsigned short = mm or 32bits float = meters). For example, if you have distance in mm in float format, the point cloud will be 1000x bigger. By default, cloud_max_depth is 4 meters (thus filtering all points of the previous case). You could try to set
cloud_max_depth to 0 (filtering disabled) to see if the clouds can be generated (even if the calibration is wrong).
EDIT1: In rtabmapviz, the maximum depth parameter for the map is under Preferences->3D Rendering.
EDIT2: You may debug the depth image scale by showing the cloud using DepthCloud display in RVIZ instead of PointCloud2.
cheers
| | 5 | No.5 Revision |
Hi,
When the generated clouds are empty, it may because the intrinsic parameters (focals) of camera_info are wrong or the depth image format is not standard (rtabmap wants 16bits unsigned short = mm or 32bits float = meters). For example, if you have distance in mm in float format, the point cloud will be 1000x bigger. By default, cloud_max_depth is 4 meters (thus filtering all points of the previous case). You could try to set
cloud_max_depth to 0 (filtering disabled) to see if the clouds can be generated (even if the calibration is wrong).
EDIT1: In rtabmapviz, the maximum depth parameter for the map is under Preferences->3D Rendering.
EDIT2: You may debug the depth image scale by showing the cloud using DepthCloud display in RVIZ instead of PointCloud2.
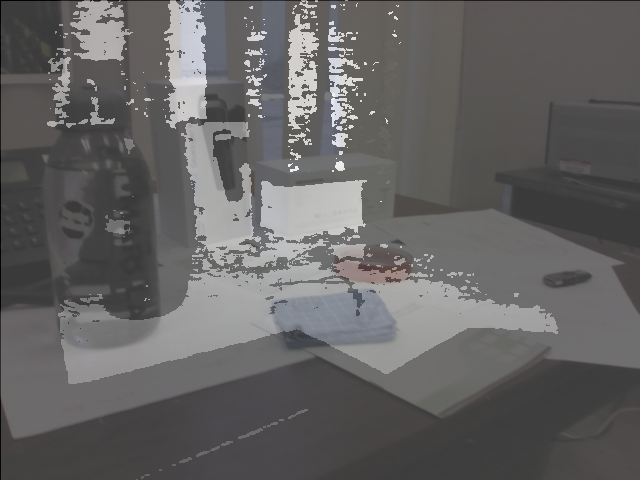
EDIT3: The database contains a map, though the depth image is not registered with the RGB image (see image below). The depth scale is large (like between 10 meters to ~40 meters). The calibration looks ok though (640x480 fx=617.326 fy=617.326 cx=321.177 cy=245.512).
cheers
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
