
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
def pose_from_vector3D(waypoint):
#http://lolengine.net/blog/2013/09/18/beautiful-maths-quaternion-from-vectors
pose= Pose()
pose.position.x = waypoint[0]
pose.position.y = waypoint[1]
pose.position.z = waypoint[2]
#calculating the half-way vector.
u = [1,0,0]
norm = linalg.norm(waypoint[3:])
v = asarray(waypoint[3:])/norm
if (array_equal(u, v)):
pose.orientation.w = 1
pose.orientation.x = 0
pose.orientation.y = 0
pose.orientation.z = 0
elif (array_equal(u, negative(v))):
pose.orientation.w = 0
pose.orientation.x = 0
pose.orientation.y = 0
pose.orientation.z = 1
else:
half = [u[0]+v[0], u[1]+v[1], u[2]+v[2]]
pose.orientation.w = dot(u, half)
temp = cross(u, half)
pose.orientation.x = temp[0]
pose.orientation.y = temp[1]
pose.orientation.z = temp[2]
norm = math.sqrt(pose.orientation.x*pose.orientation.x + pose.orientation.y*pose.orientation.y +
pose.orientation.z*pose.orientation.z + pose.orientation.w*pose.orientation.w)
if norm == 0:
norm = 1
pose.orientation.x /= norm
pose.orientation.y /= norm
pose.orientation.z /= norm
pose.orientation.w /= norm
return pose
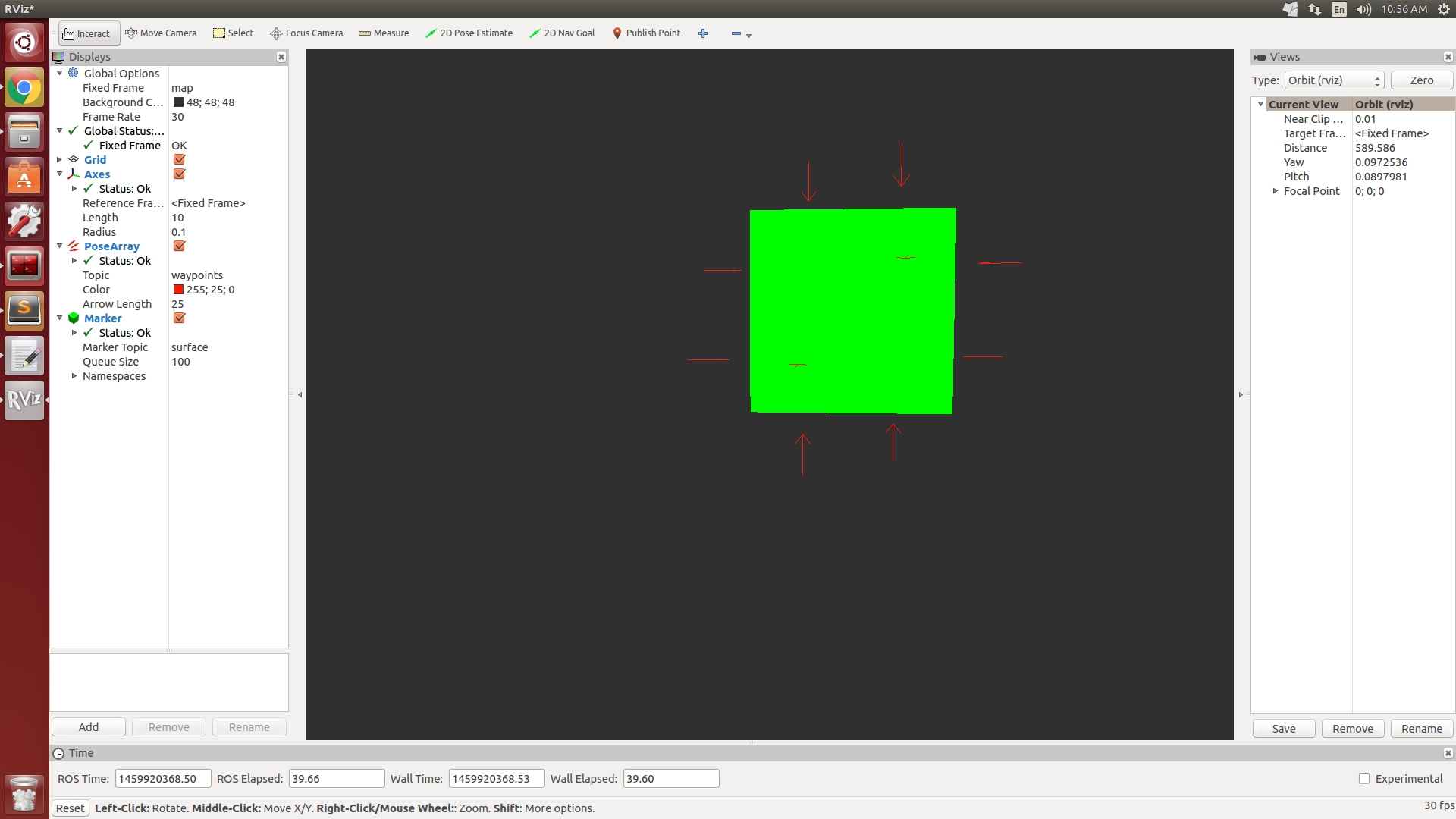
I realized my mistake, I didn't normalize the quaternion. This code works!
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.