
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
For anyone interested in writing a robust global planner plug-in for full coverage, the algorithm presented in the introduction of this published paper works well:
(https://scholar.google.com/scholar?q=planning+paths+of+complete+coverage+of+a+unstructured+enviroment+by+a+mobile&btnG=&hl=en&as_sdt=0%2C43)
The global planner algorithm steps are: 1) Use costmap2d (costmap_->getCost(x,y) in c++) to divide the map into occupied and free cells 2) Identify the closest cells to the desired start and end pose 3) Use a wavefront algorithm to assign the distance transform value at each cell 4) Iterate through these cells in a path of slowest decent as described in the paper
Next, you can implement the teb_local_planner for path following, but be sure to shorten the prune path value to something like 0.1m (found in teb_local_planner_ros.h). Otherwise the optimizer gets stuck. Id add a picture but i dont have enough karma...
| | 2 | No.2 Revision |
For anyone interested in writing a robust global planner plug-in for full coverage, the algorithm presented in the introduction of this published paper works well:
(https://scholar.google.com/scholar?q=planning+paths+of+complete+coverage+of+a+unstructured+enviroment+by+a+mobile&btnG=&hl=en&as_sdt=0%2C43)
The global planner algorithm steps are:
1) Use costmap2d (costmap_->getCost(x,y) in c++) to divide the map into occupied and free cells
2) Identify the closest cells to the desired start and end pose
3) Use a wavefront algorithm to assign the distance transform value at each cell
cell
EDIT: This image shows the full coverage path in yellow covering most of the willow garage map. I have include the z-axis to shed some light on the algorithm. the red points represent the distance transform cost of every free cell (higher=more cost), and the planner plans the slowest decent down this gradient funnel. Note the lowest area is the goal point. 4) Iterate through these cells in a path of slowest decent as described in the paper
Next, you can implement the teb_local_planner for path following, but be sure to shorten the prune path value to something like 0.1m (found in teb_local_planner_ros.h). Otherwise the optimizer gets stuck. Id add a picture but i dont have enough karma...
| | 3 | No.3 Revision |
For anyone interested in writing a robust global planner plug-in for full coverage, the algorithm presented in the introduction of this published paper works well:
(https://scholar.google.com/scholar?q=planning+paths+of+complete+coverage+of+a+unstructured+enviroment+by+a+mobile&btnG=&hl=en&as_sdt=0%2C43)
The global planner algorithm steps are: 1) Use costmap2d (costmap_->getCost(x,y) in c++) to divide the map into occupied and free cells 2) Identify the closest cells to the desired start and end pose 3) Use a wavefront algorithm to assign the distance transform value at each cell
EDIT: This image shows the full coverage path in yellow covering most of the willow garage map. I have include included the z-axis to shed some light on the algorithm. the red points represent the distance transform cost of every free cell (higher=more cost), and the planner plans the slowest decent down this gradient funnel. Note the lowest area is the goal point.
4) Iterate through these cells in a path of slowest decent as described in the paper
Next, you can implement the teb_local_planner for path following, but be sure to shorten the prune path value to something like 0.1m (found in teb_local_planner_ros.h). Otherwise the optimizer gets stuck. Id add a picture but i dont have enough karma...
| | 4 | No.4 Revision |
For anyone interested in writing a robust global planner plug-in for full coverage, the algorithm presented in the introduction of this published paper works well:
(https://scholar.google.com/scholar?q=planning+paths+of+complete+coverage+of+a+unstructured+enviroment+by+a+mobile&btnG=&hl=en&as_sdt=0%2C43)
The global planner algorithm steps are: 1) Use costmap2d (costmap_->getCost(x,y) in c++) to divide the map into occupied and free cells 2) Identify the closest cells to the desired start and end pose 3) Use a wavefront algorithm to assign the distance transform value at each cell
4) Iterate through these cells in a path of slowest decent as described in the paper
Next, you can implement the teb_local_planner for path following, but be sure to shorten the prune path value to something like 0.1m (found in teb_local_planner_ros.h). Otherwise the optimizer gets stuck. Id add a picture but i dont have enough karma...
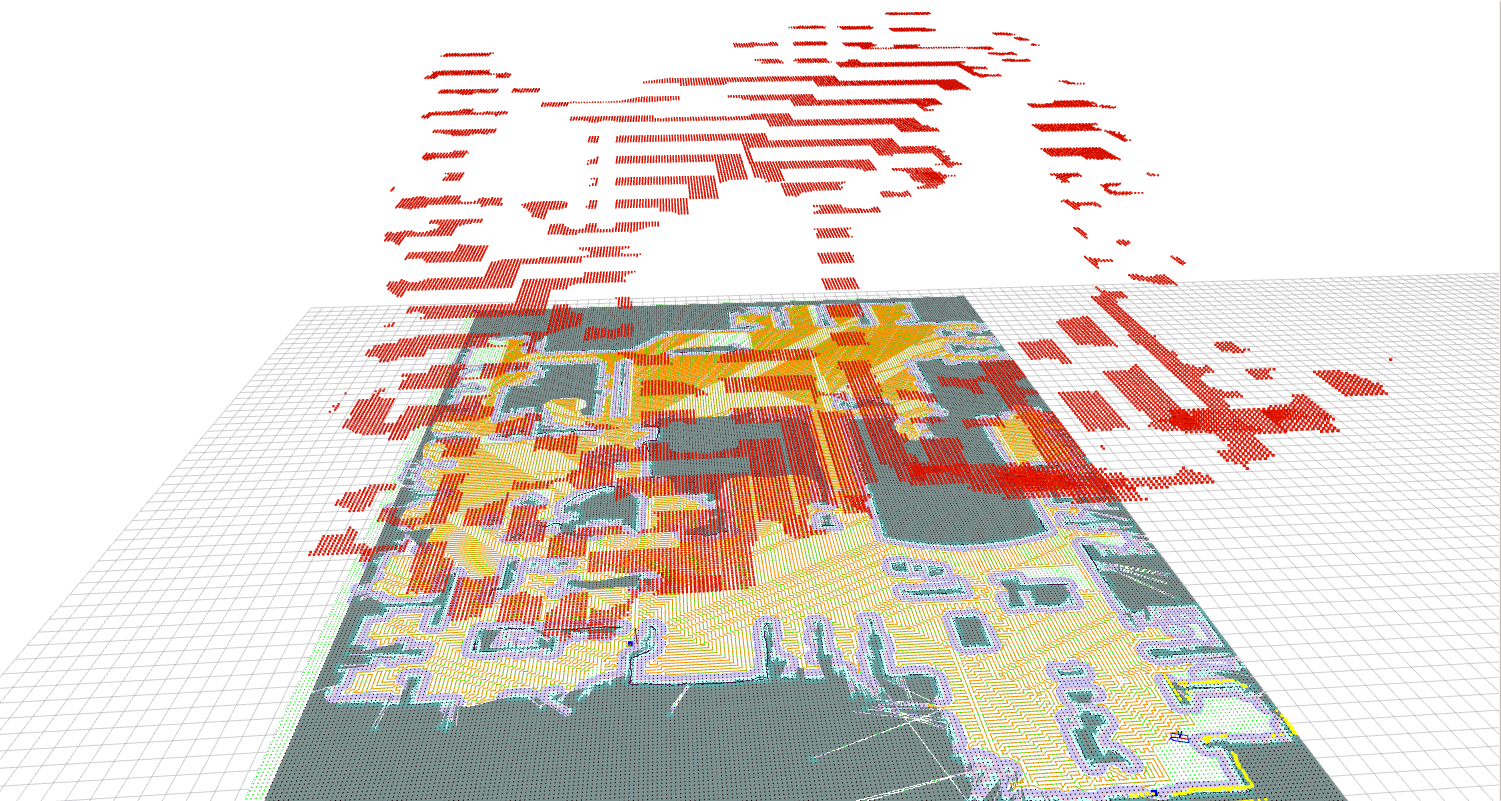
EDIT: Thank you for the karma! This image shows the full coverage path in yellow covering most of the willow garage map. I have included the z-axis to shed some light on the algorithm. the red points represent the distance transform cost of every free cell (higher=more cost), and the planner plans the slowest decent down this gradient funnel. Note the lowest area is the goal point.
4) Iterate through these cells in a path of slowest decent as described in the paper
Next, you can implement the teb_local_planner for path following, but be sure to shorten the prune path value to something like 0.1m (found in teb_local_planner_ros.h). Otherwise the optimizer gets stuck. Id add a picture but i dont have enough karma...
| | 5 | No.5 Revision |
For anyone interested in writing a robust global planner plug-in for full coverage, the algorithm presented in the introduction of this published paper works well:
(https://scholar.google.com/scholar?q=planning+paths+of+complete+coverage+of+a+unstructured+enviroment+by+a+mobile&btnG=&hl=en&as_sdt=0%2C43)
The global planner algorithm steps are:
1) Use costmap2d (costmap_->getCost(x,y) in c++) to divide the map into occupied and free cells
2) Identify the closest cells to the desired start and end pose
3) Use a wavefront algorithm to assign the distance transform value at each cell
cell 4) Iterate through these cells in a path of slowest decent as described in the paper
Next, you can implement the teb_local_planner for path following, but be sure to shorten the prune path value to something like 0.1m (found in teb_local_planner_ros.h). Otherwise the optimizer gets stuck. Id add a picture but i dont have enough karma...
EDIT: Thank you for the karma! This image shows the full coverage path in yellow covering most of the willow garage map. I have included the z-axis to shed some light on the algorithm. the red points represent the distance transform cost of every free cell (higher=more cost), and the planner plans the slowest decent down this gradient funnel. Note the lowest area is the goal point.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.