
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
First, make sure that navsat_transform is broadcasting the world_frame->utm transform (you've probably already done this). In your launch file for navsat_transform make sure that broadcast_utm_transform=true. Next, launch Rviz and check the TF tree, you should see something like this:
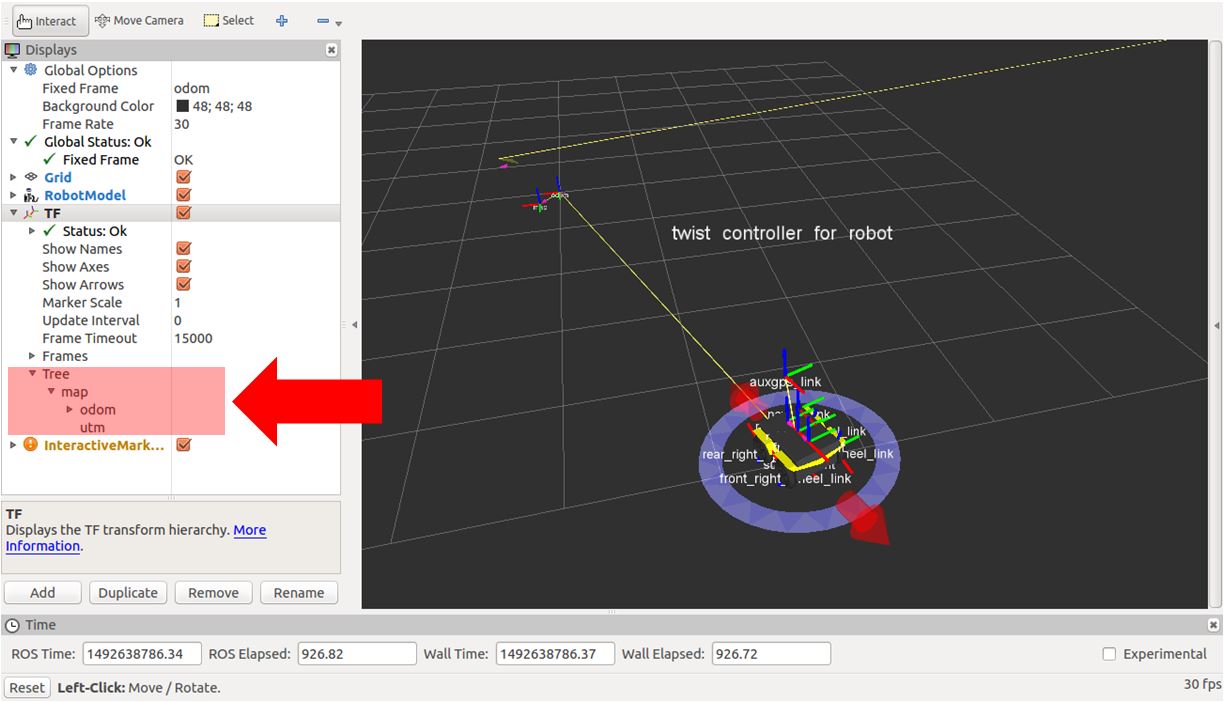
Note that for reasons explained here on the docs page, the utm frame is actually a child of the map/world_frame.
Also as an FYI, even though the utm frame is there, it doesn't seem to show up when you run rosrun tf view_frames (at least not for me anyway). The easiest way I've found to check the existence of the utm frame is to check it like this in Rviz.
The move_base node should accept move goals in any frame, provided there is a valid transformation between the frame you specify and the base_link frame. The easiest way to do this is just to send a PoseStamped message to the /move_base_simple/goal topic. You should be able to specify whatever frame you want in the header.
If you want a more complicated way of doing this that also lets you get feedback on your goal, I suggest you look at the actionlib package and these questions here and here for more information and some sample code.
Hopefully this helps or at least points you in the right direction. Let me know how you get on, and if any specific error messages appear when you try sending a move goal in the utm frame, post those as well since that might help debug the problem.
| | 2 | No.2 Revision |
First, make sure that navsat_transform is broadcasting the world_frame->utm transform (you've probably already done this). In your launch file for navsat_transform make sure that broadcast_utm_transform=true. Next, launch Rviz and check the TF tree, you should see something like this:
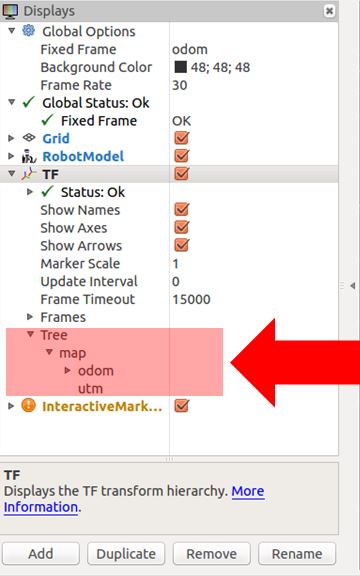
You should see utm in the list. Note that for reasons explained here on the docs page, the utm frame is actually a child of the map/world_frame.
Also as an FYI, even though the utm frame is there, it doesn't seem to show up when you run rosrun tf view_frames (at least not for me anyway). The easiest way I've found to check the existence of the utm frame is to check it like this in Rviz.
move_base node should accept move goals in any frame, provided there is a valid transformation between the frame you specify and the base_link frame. The easiest way to do this is just to send a PoseStamped message to the /move_base_simple/goal topic. You should be able to specify whatever frame you want in the header. If you want a more complicated way of doing this that also lets you get feedback on your goal, I suggest you look at the actionlib package and these questions here and here for more information and some sample code.
Hopefully this helps or at least points you in the right direction. Let me know how you get on, and if any specific error messages appear when you try sending a move goal in the utm frame, post those as well since that might help debug the problem.
| | 3 | No.3 Revision |
First, make sure that navsat_transform is broadcasting the world_frame->utm transform (you've probably already done this). In your launch file for navsat_transform make sure that broadcast_utm_transform=true. Next, launch Rviz and check the TF tree, you should see something like this:
You should see utm in the list. Note that for reasons explained here on the docs page, the utm frame is actually a child of the map/world_frame.
Also as an FYI, even though the utm frame is there, it doesn't seem to show up when you run rosrun tf view_frames (at least not for me anyway). The easiest way I've found to check the existence of the utm frame is to check it like this in Rviz.
move_base node should accept move goals in any frame, provided there is a valid transformation between the frame you specify and the base_link frame. The easiest way to do this is just to send a PoseStamped message to the /move_base_simple/goal topic. You should be able to specify whatever frame you want in the header. If you want a more complicated way of doing this that also lets you get feedback on your goal, I suggest you look at the actionlib package and these questions here and here for more information and some sample code.
Hopefully this helps or at least points you in the right direction. Let me know how you get on, and if any specific error messages appear when you try sending a move goal in the utm frame, post those as well since that might help debug the problem.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
