
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I think now I understand why amcl publishes the map to odom transform. This is explained in the Transforms section of the amcl documention. Reproducing it here with the relevant emphasis:
amcl transforms incoming laser scans to the odometry frame (~odom_frame_id). So there must exist a path through the tf tree from the frame in which the laser scans are published to the odometry frame.
An implementation detail: on receipt of the first laser scan, amcl looks up the transform between the laser's frame and the base frame (~base_frame_id), and latches it forever. So amcl cannot handle a laser that moves with respect to the base.
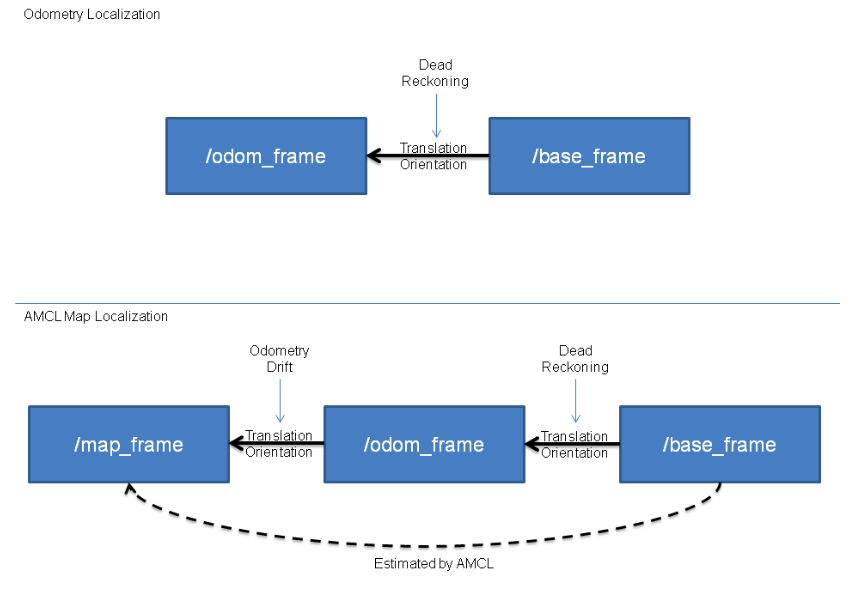
The drawing below shows the difference between localization using odometry and amcl. During operation amcl estimates the transformation of the base frame (~base_frame_id) in respect to the global frame (~global_frame_id) but it only publishes the transform between the global frame and the odometry frame (~odom_frame_id). Essentially, this transform accounts for the drift that occurs using Dead Reckoning.
Additionally this post also helped me cement this understanding - How to broadcast a transform between /map and /odom.
So to summarize:
| | 2 | No.2 Revision |
I think now I understand why amcl publishes the map to odom transform. This is explained in the Transforms section of the amcl documentiondocumentation. Reproducing it here with the relevant emphasis:
amcl transforms incoming laser scans to the odometry frame (~odom_frame_id). So there must exist a path through the tf tree from the frame in which the laser scans are published to the odometry frame.
An implementation detail: on receipt of the first laser scan, amcl looks up the transform between the laser's frame and the base frame (~base_frame_id), and latches it forever. So amcl cannot handle a laser that moves with respect to the base.
The drawing below shows the difference between localization using odometry and amcl. During operation amcl estimates the transformation of the base frame (~base_frame_id) in respect to the global frame (~global_frame_id) but it only publishes the transform between the global frame and the odometry frame (~odom_frame_id). Essentially, this transform accounts for the drift that occurs using Dead Reckoning.
Additionally this post also helped me cement this understanding - How to broadcast a transform between /map and /odom.
So to summarize:
| | 3 | No.3 Revision |
I think now I understand why amcl publishes the map to odom transform. This is explained in the Transforms section of the amcl documentation. Reproducing it here with the relevant emphasis:
amcl transforms incoming laser scans to the odometry frame (~odom_frame_id). So there must exist a path through the tf tree from the frame in which the laser scans are published to the odometry frame.
An implementation detail: on receipt of the first laser scan, amcl looks up the transform between the laser's frame and the base frame (~base_frame_id), and latches it forever. So amcl cannot handle a laser that moves with respect to the base.
The drawing below shows the difference between localization using odometry and amcl. During operation amcl estimates the transformation of the base frame (~base_frame_id) in respect to the global frame (~global_frame_id) but it only publishes the transform between the global frame and the odometry frame (~odom_frame_id). Essentially, this transform accounts for the drift that occurs using Dead Reckoning.
Additionally this post these posts also helped me cement this understanding - understanding:
So to summarize:
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
