
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
You will know if the Pseudo Input has been activated if the circle next to the description has a solid dark-blue fill. If the signal if off, then the there will be dark-blue outline with a light-blue fill.
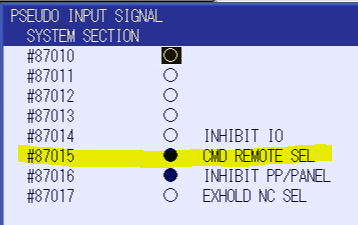
Programmatically, you would be able to determine this when you send motion commands to the robot. If this signal has not been enabled, then the robot will reply with a result of ROS_RESULT_NOT_READY and a subcode of ROS_RESULT_NOT_READY_NOT_REMOTE. Though, this reply code could also indicate that the mode-selector-switch on the pendant has not been rotated fully clockwise into REMOTE mode.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.