
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Yes, we can use only camera afterwards in localization mode. subscribe_scan should be false, look at the terminal info message to make sure rtabmap node is not subscribing to a scan topic. You will have to change also some parameters that required a laser scan. For example, Reg/Strategy should be set back to 0 (only visual). RGBD/CreateOccupancyGrid can be also set to false in localization mode.
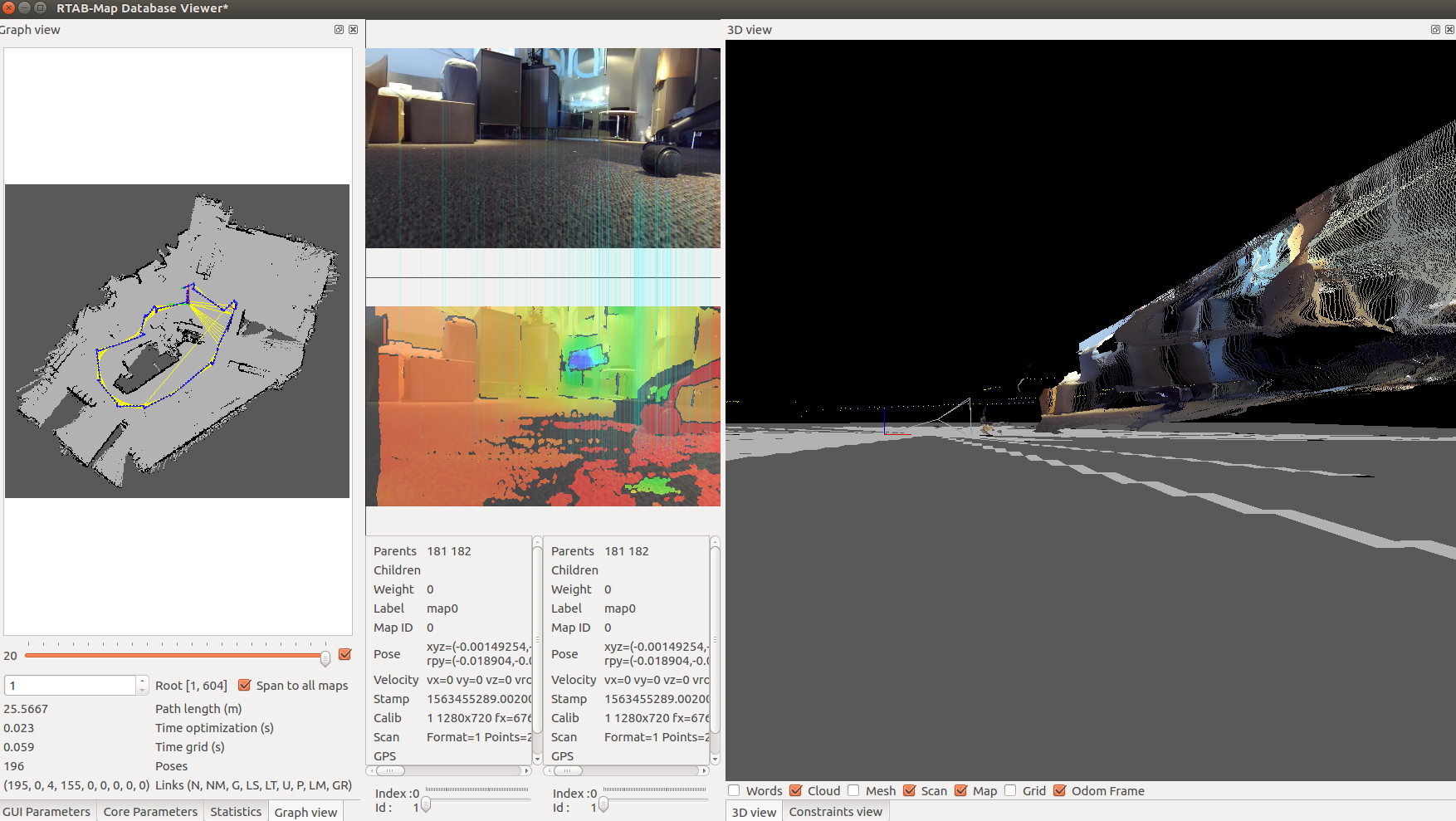
The pitch rotation of the camera is not good, verify your TF. This makes the camera cloud tilted over the ground. See on the right:
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
