
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Is there software for modeling the URDF robot like in CAD or at least a list of shortcuts to cut-down time for manually re-compiling XML files over and over again to move stuff into the right positions/rotations?
To each his own, but after you get a bit more comfortable with it, being able to simply load a text file (xml is essentially just text) into an editor and quickly tweak a constant (ie: length of a link, rotation of an axis) here and there is actually really convenient.
Note: I'm not saying there aren't legitimate use-cases for wanting to use a CAD program, but it's a rather large overhead to have to start it all up, change something, save, export, copy over, etc. @Teo Cardoso already mentioned some of the plugins for some CAD tools you could use.
Having written all of that: you could take a look at the ROS plugin for VSCode. It has support for almost live preview of URDF/XACRO while you're editing it (screenshot from here):
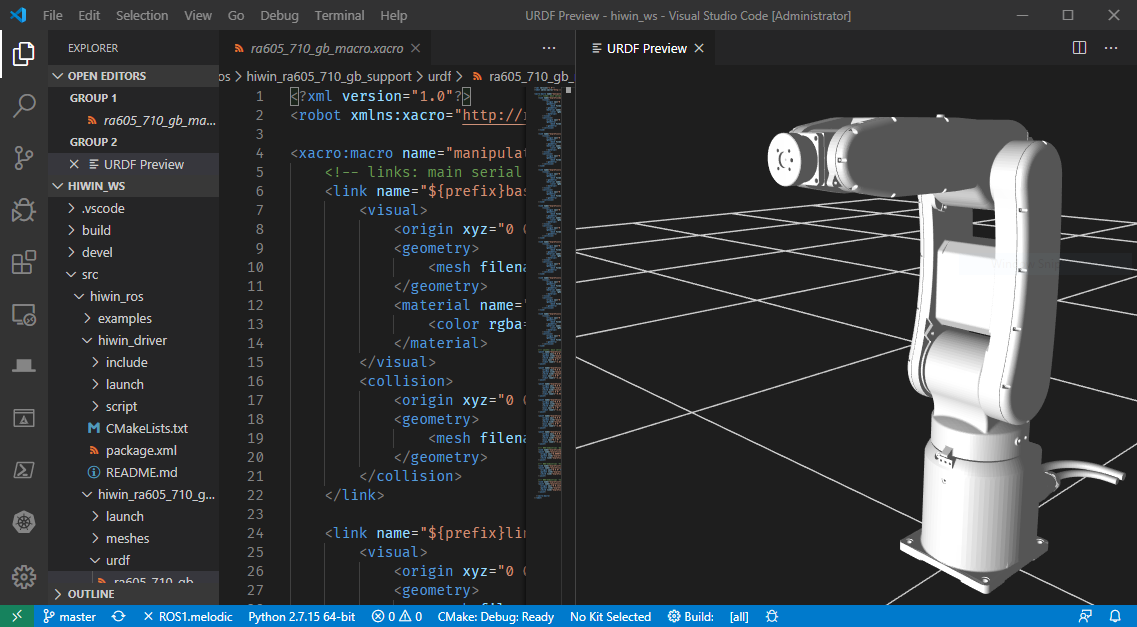
You'd still be editing text, but it would cut down on the iteration that seems to be your biggest annoyance.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.