
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Nitesh_j you were right. THANKS so much!!!!
I have implemented my own cpp code to downsample to 50Hz and set the frequency parameter in robot_localization at 50 Hz as well.
I am not sure why it was not working when downsampling with topic_tools. I will add my code in case it is useful for somebody:
#include "ros/ros.h"
#include "sensor_msgs/Imu.h"
#include <iostream>
using namespace std;
class ImuFrequency
{
public:
ImuFrequency()
{
sub_ = nh_.subscribe("imu/data_added_cov", 1, &ImuFrequency::imuCallback, this);
pub_ = nh_.advertise<sensor_msgs::Imu>("imu/data_low_freq", 1);
}
void imuCallback(const sensor_msgs::ImuConstPtr &msg);
private:
ros::NodeHandle nh_;
ros::Subscriber sub_;
ros::Publisher pub_;
sensor_msgs::Imu imu_msg_;
};
void ImuFrequency::imuCallback(const sensor_msgs::ImuConstPtr &msg)
{
imu_msg_ = *msg;
ros::Time imu_time = ros::Time::now();
imu_msg_.header.stamp = imu_time;
pub_.publish(imu_msg_);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "imu_add_covariances");
ImuFrequency imufrequency;
ros::Rate loop_rate(50);
while(ros::ok())
{
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
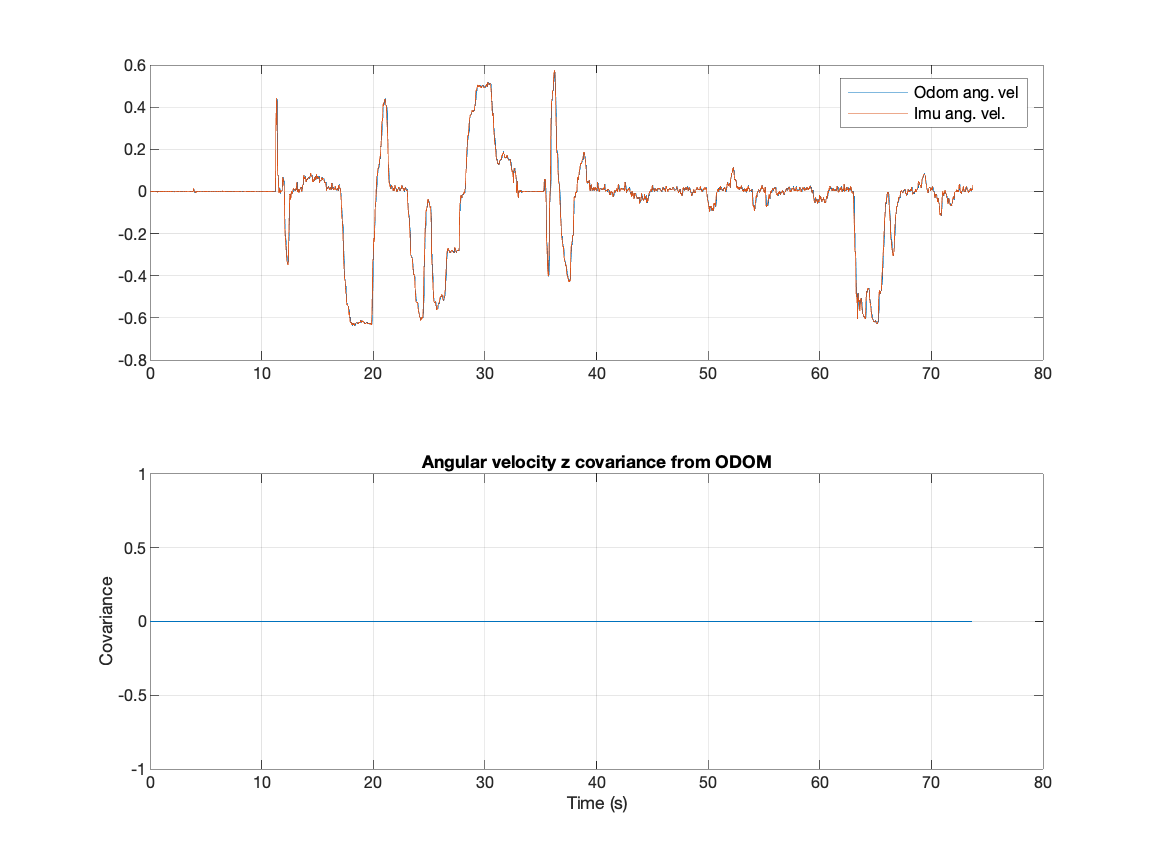
Here is the angular velocity z from both IMU and odometry. Finally, there is NO DELAY. The odometry covariance does not act weird anymore:
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.