
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
If you check the QoS profile for sensor_data you will see that reliability is set to the best effort:
https://github.com/ros2/rclcpp/blob/f160a8bc1d2b4f9a9fb0bba23d0b5d0f8c1afaab/rclcpp/include/rclcpp/qos.hpp#L168
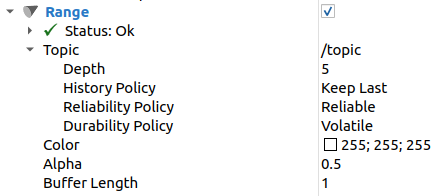
Now, if you add a new visualization to RViz2 it will have reliability policy set to Reliable by default:
https://i.imgur.com/l6JzQlE.png
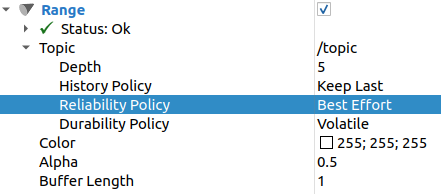
Therefore, just change reliability to Best Effort:
https://i.imgur.com/WVnTjTb.png
If you want to test, you can set --qos-profile to ros2 topic pub as:
ros2 topic pub --qos-profile=sensor_data /topic sensor_msgs/Range '{ range: 1, header: { frame_id: base_link } }'
| | 2 | No.2 Revision |
If you check the QoS profile for sensor_data you will see that reliability is set to the best effort:
https://github.com/ros2/rclcpp/blob/f160a8bc1d2b4f9a9fb0bba23d0b5d0f8c1afaab/rclcpp/include/rclcpp/qos.hpp#L168
Now, if you add a new visualization to RViz2 it will have reliability policy set to Reliable by default:
Therefore, just change reliability to Best Effort:
If you want to test, you can set --qos-profile to ros2 topic pub as:
ros2 topic pub --qos-profile=sensor_data /topic sensor_msgs/Range '{ range: 1, header: { frame_id: base_link } }'
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.