
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
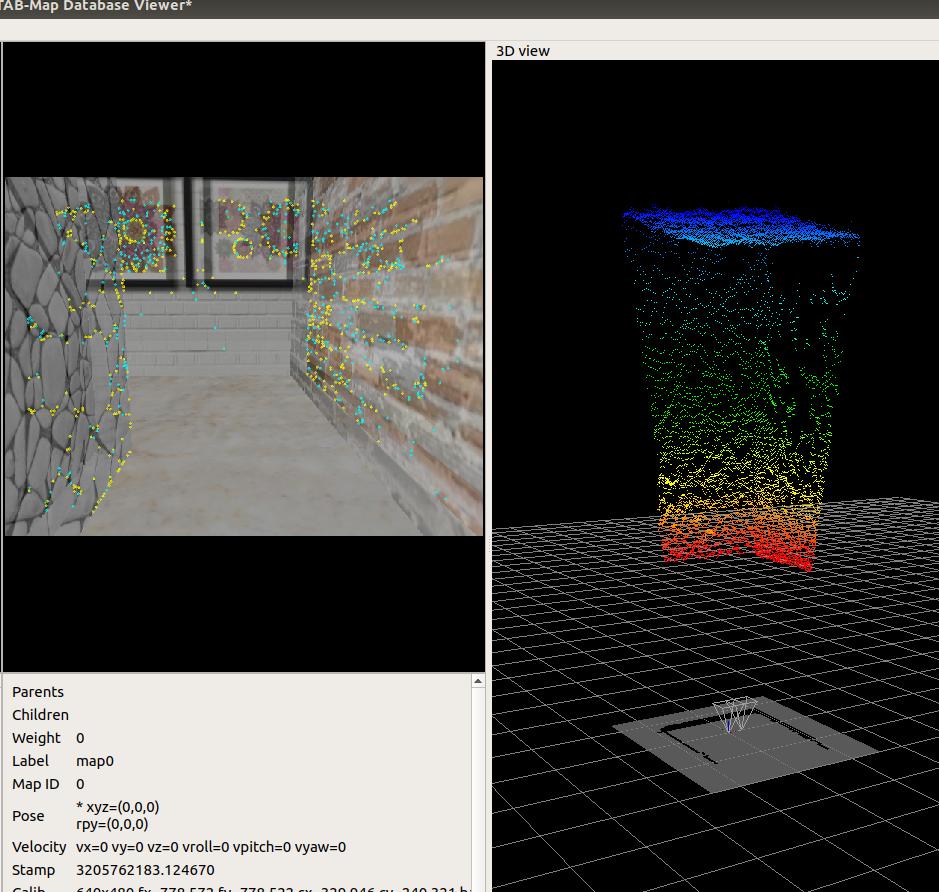
The problem is that there is a missing optical rotation. rtabmap thinks the camera is looking up.
The frame_id is set to camera_link. I don't know if it is on a robot or it is a single camera in simulation, for a robot, you may add in the URDF the optical rotation. Otherwise if camera_link is your only frame, in ros1 we would add a static transform publisher:
<node pkg="tf" type="static_transform_publisher" name="camera_optical_rotation"
args="0 0 0 -1.5707963267948966 0 -1.5707963267948966 base_link camera_link 100" />
Then use frame_id set to base_link for rtabmap node.
| | 2 | No.2 Revision |
The problem is that there is a missing optical rotation. rtabmap thinks the camera is looking up.
The frame_id is set to camera_link. I don't know if it is on a robot or it is a single camera in simulation, for a robot, you may add in the URDF the optical rotation. Otherwise if camera_link is your only frame, in ros1 we would add a static transform publisher:publisher in the launch file like this:
<node pkg="tf" type="static_transform_publisher" name="camera_optical_rotation"
args="0 0 0 -1.5707963267948966 0 -1.5707963267948966 base_link camera_link 100" />
Then use frame_id set to base_link for rtabmap node.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
