
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
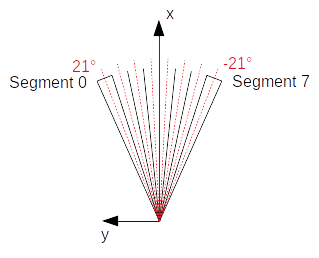
As mentioned in my comment, the convention is for angles to be measured counter-clockwise (right-hand rule) from the x axis (see REP 103). With a 48° field of view evenly split into 8 segments, each segment should be 6° as you noted. This user guide says the FoV is 47.5°, so you may want to double-check. I'll assume 48° here. If the FoV is centered on the x-axis (forward) in the lidar frame, the segment angles should be {21, 15, 9, 3, -3, -9, -15, -21} in degrees. Note that I'm assuming the segments are ordered left to right (segment 0 is left-most, the most positive angle), which agrees with the diagram on page 41 of the linked user guide, but that's another assumption that you should double-check. Here's a diagram for clarity:
| | 2 | No.2 Revision |
As mentioned in my comment, the convention is for angles to be measured counter-clockwise (right-hand rule) from the x axis (see REP 103). With a 48° field of view evenly split into 8 segments, each segment should be 6° as you noted. This user guide says the FoV is 47.5°, so you may want to double-check. I'll assume 48° here. If the FoV is centered on the x-axis (forward) in the lidar frame, the segment angles should be {21, 15, 9, 3, -3, -9, -15, -21} in degrees. Note that I'm assuming the segments are ordered left to right (segment 0 is left-most, the most positive angle), which agrees with the diagram on page 41 of the linked user guide, but that's another assumption that you should double-check. Here's a diagram for clarity:
Update from @mros:
I checked the sensor and the segments are ordered right to left (not as mentioned in the datasheet). So, {-21,-15,-9,-3,3,9,15,21} is the order (from 0 to 7).
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.