
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
There are several issues here:
1- In CARLA road network map, the position of traffic lights are not correct.
2- The traffic light is represented with one position (not as autoware handle it ) red lamp , green lamp, yellow lamp separately.
So common traffic light recognition inside autoware will not work, because it expct precise position of the lights.
You will need to create your own traffic light recognizer which can detect the light according to relative position not the absolute position.
Hope this helps.
| | 2 | No.2 Revision |
There are several issues here:
1- In CARLA road network map, the position of traffic lights are not correct.
2- The traffic light is represented with one position (not as autoware handle it ) red lamp , green lamp, yellow lamp separately.
So common traffic light recognition inside autoware will not work, because it expct precise position of the lights.
You will need to create your own traffic light recognizer which can detect the light according to relative position not the absolute position.
Hope this helps.
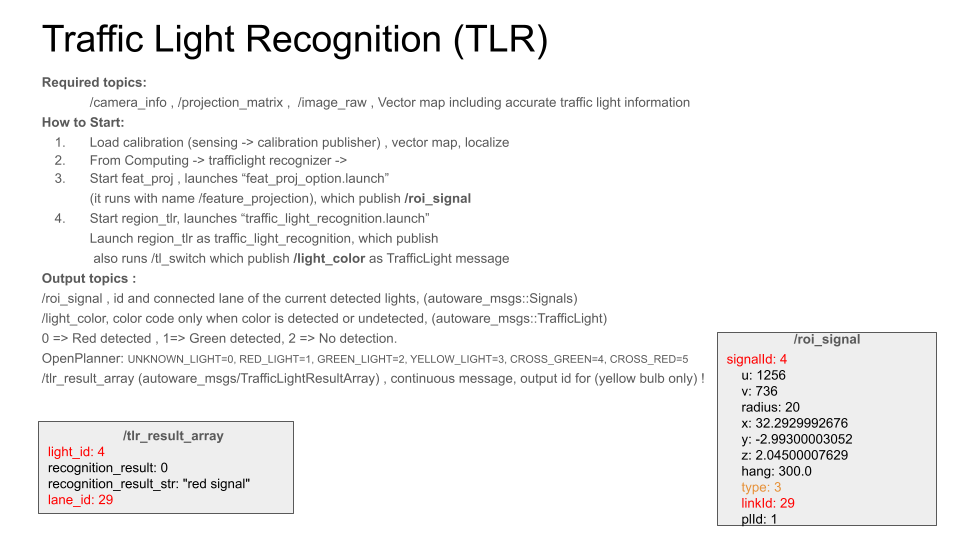
Update to the answer:
This is steps of how use TLR in Autoware
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.