
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Better check out this page: http://wiki.ros.org/dwa_local_planner
And the source code for DWA: https://github.com/ros-planning/navigation/blob/noetic-devel/dwa_local_planner/src/dwa_planner.cpp
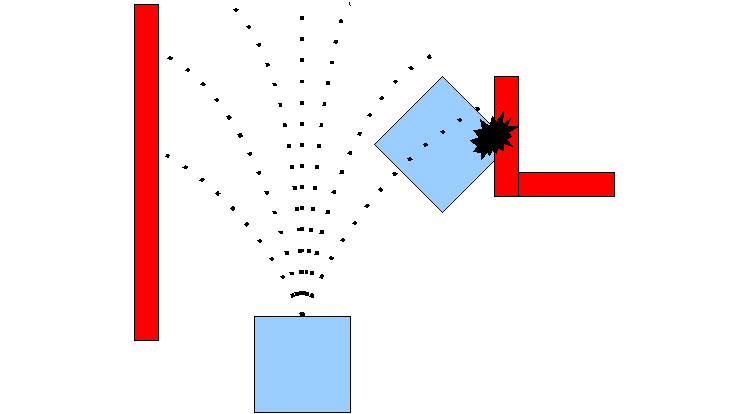
A simple pipeline should be: A* send a path to DWA. DWA will generate a series of trajectories according to the params, velocities, vx, vy, vtheta samples, sim_time, etc.. then calculate the cost for each trajectory according to path_cost, goal_cost, occ_cost. In the end, find out the best trajectory.
DWA initializes with local costmap. local costmap contains map and sensor information.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
