
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Please refer to this tutorial for further info: https://www.clearpathrobotics.com/assets/guides/kinetic/ros/Driving%20Husky%20with%20ROSSerial.html
#include <ArduinoHardware.h>
#include <ros.h>
#include <geometry_msgs/Twist.h>
ros::NodeHandle nh;
geometry_msgs::Twist msg;
ros::Publisher pub("husky/cmd_vel", &msg);
void setup()
{
nh.initNode();
nh.advertise(pub);
} void loop()
{
if(digitalRead(8)==1)
msg.linear.x=-0.25;
else if (digitalRead(4)==1)
msg.linear.x=0.25;
else if (digitalRead(8)==0 && digitalRead(4)==0)
msg.linear.x=0;
pub.publish(&msg);
nh.spinOnce();
}
As you can see a Twist message is published to the cmd_vel topic. Twist message is composed of Linear and Angular velocities as can be seen here:
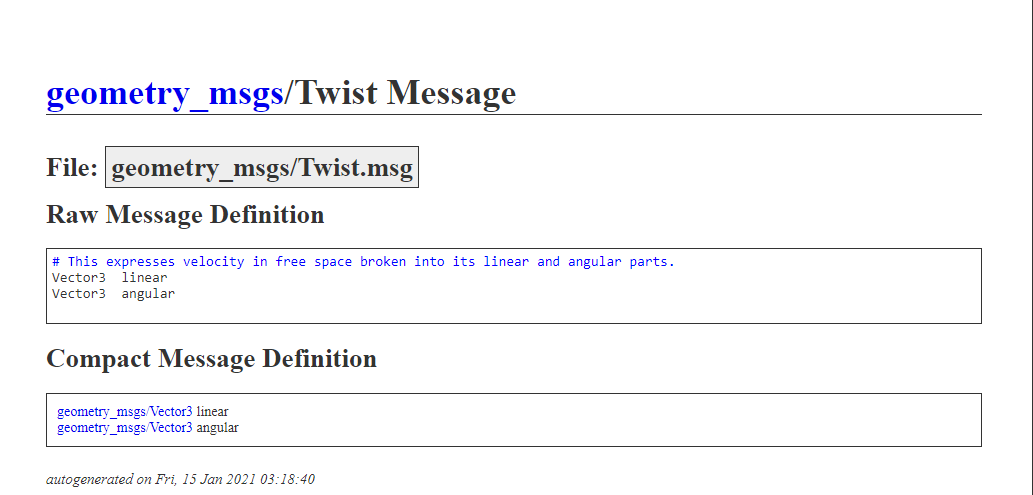
Once code loaded in Arduino and publishing velocity commands, we can pass these messages along into our ROS environment through rosserial
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
