
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
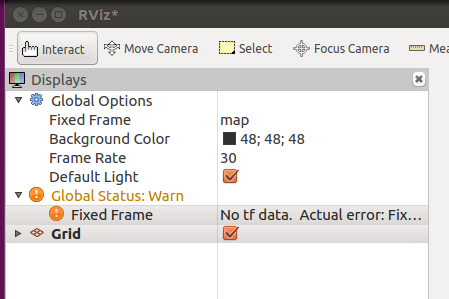
For visualization, by default, RViz doesn't create a world frame and you will see no tf data. actual error fixed frame map does not exist in RViz GUI. See the following picture
To set up the scene, you need to use static_transform_publisher. Now you open a new terminal and type the following
rosrun tf static_transform_publisher 0 0 0 0 0 0 1 map world 5
You can see how static_transform_publisher is defined as follows: see the documentation
static_transform_publisher x y z yaw pitch roll frame_id child_frame_id period_in_ms
Publish a static coordinate transform to tf using an x/y/z offset in meters and yaw/pitch/roll in radians. (yaw is rotation about Z, pitch is rotation about Y, and roll is rotation about X). The period, in milliseconds, specifies how often to send a transform. 100ms (10hz) is a good value.
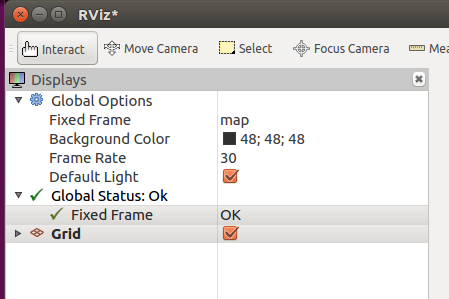
Once you prepare the scene, you see the following picture
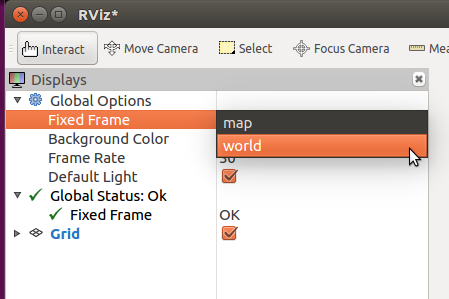
Finally to reflect the change, go to Fixed Frame, you choose world (i.e. the one you've typed before) and hit enter as follows
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.