
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
The riding mower will require Ackermann steering model so you can turn with the front wheels.
Ackermann steering geometry is a geometric arrangement of linkages in the steering of a car or other vehicle designed to solve the problem of wheels on the inside and outside of a turn needing to trace out circles of different radii.
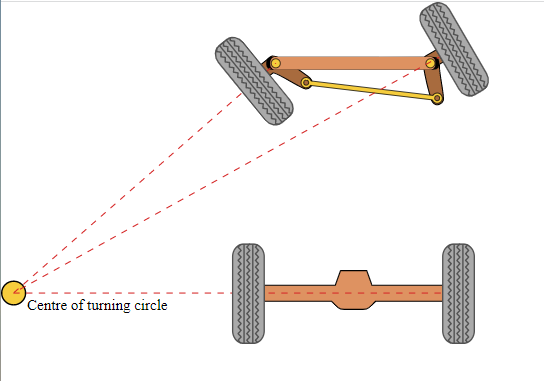 Source: https://en.wikipedia.org/wiki/Ackermann_steering_geometry
Source: https://en.wikipedia.org/wiki/Ackermann_steering_geometry
Take a look at this Gazebo plugin that you can adapt: https://github.com/froohoo/ackermansteer. And there is a good video that explains the application: https://www.youtube.com/watch?v=WlFdLkD3wa8
| | 2 | No.2 Revision |
The riding mower will require Ackermann steering model so you can turn with the front wheels.
Ackermann steering geometry is a geometric arrangement of linkages in the steering of a car or other vehicle designed to solve the problem of wheels on the inside and outside of a turn needing to trace out circles of different radii.
Source: https://en.wikipedia.org/wiki/Ackermann_steering_geometry
Take a look at this Gazebo plugin that you can adapt: https://github.com/froohoo/ackermansteer. And there is a good video that explains the application: https://www.youtube.com/watch?v=WlFdLkD3wa8
Another example: https://github.com/ros-simulation/gazebo_ros_pkgs/blob/dashing/gazebo_plugins/worlds/gazebo_ros_ackermann_drive_demo.world
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
