
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
rgbd_odometry will use 100% of a core on most systems if images are streamed at 30 Hz. rgbd_odometry processes all frames that it can, dropping frames if processing time per frame is over 33 ms in this case. We can reduce rgbd_odometry CPU usage without modifying its parameters by simply decreasing camera frame rate and/or resolution.
The visual odometry pipeline is described in this paper, in particular in this figure:
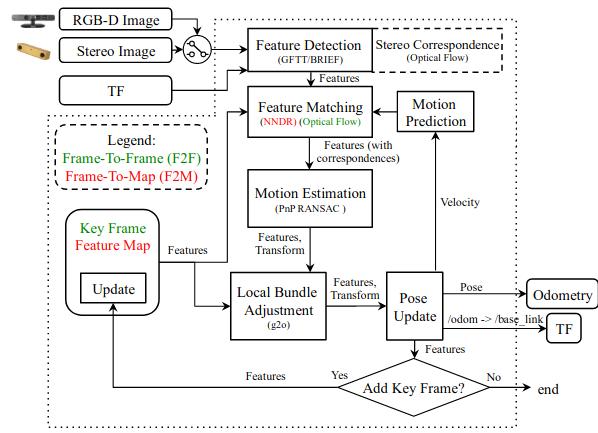
F2F odometry is quite faster than F2M (default), though less accurate.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
