
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
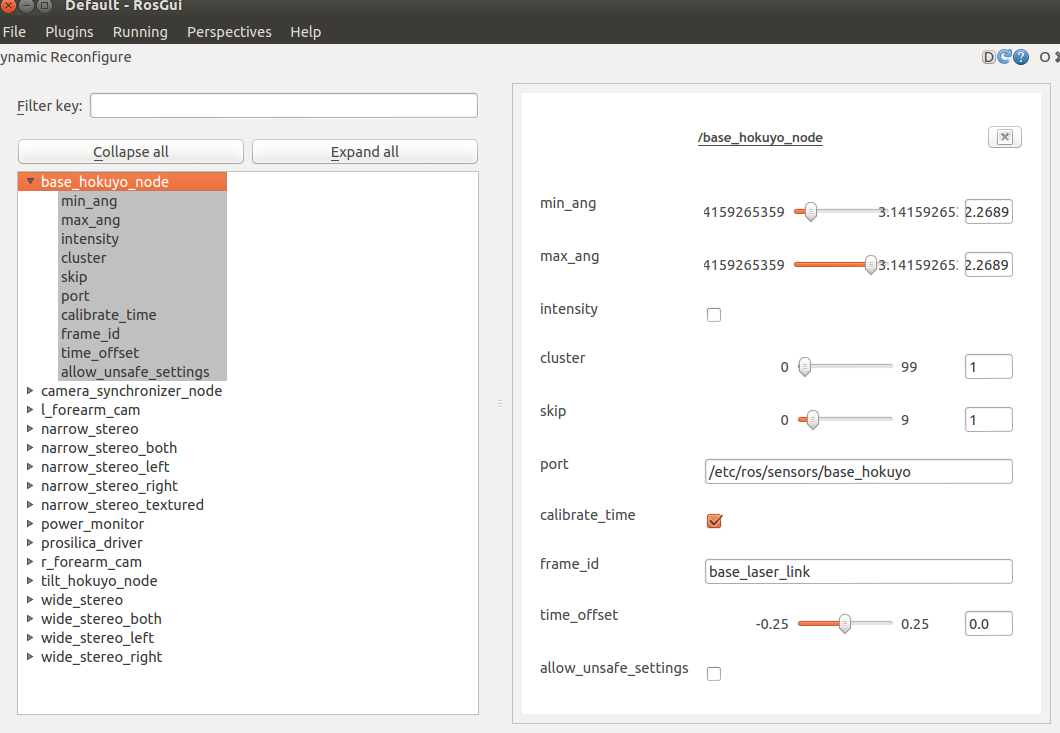
The canonical answer to this would likely be: rqt_reconfigure (which also exists for ROS 2).
Whether that would fit your requirements only you can decide of course.
Your post confuses me somewhat though:
I've some years of experience in running ROS1 applications and tuning a limited number of scalar and vector parameters by means of
rosparam.
did you have to restart the node(s) for which you changed those parameters? Nodes re-reading their ROS parameters at runtime is a known anti-pattern, but that would be the only way to "tune" parameters while things are running.
dynamic_reconfigure would be the infrastructure to use for runtime updating of parameters, but if you were already using that, I'd expect rqt_reconfigure to be a known tool.
| | 2 | No.2 Revision |
The canonical answer to this would likely be: rqt_reconfigure (which also exists for ROS 2).):
Whether that would fit your requirements only you can decide of course.
Your post confuses me somewhat though:
I've some years of experience in running ROS1 applications and tuning a limited number of scalar and vector parameters by means of
rosparam.
did you have to restart the node(s) for which you changed those parameters? Nodes re-reading their ROS parameters at runtime is a known anti-pattern, but that would be the only way to "tune" parameters while things are running.
dynamic_reconfigure would be the infrastructure to use for runtime updating of parameters, but if you were already using that, I'd expect rqt_reconfigure to be a known tool.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.