
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
There is no need to reinvent the wheel. Please read page # 18 of the user manual. I am attaching it below for reference:
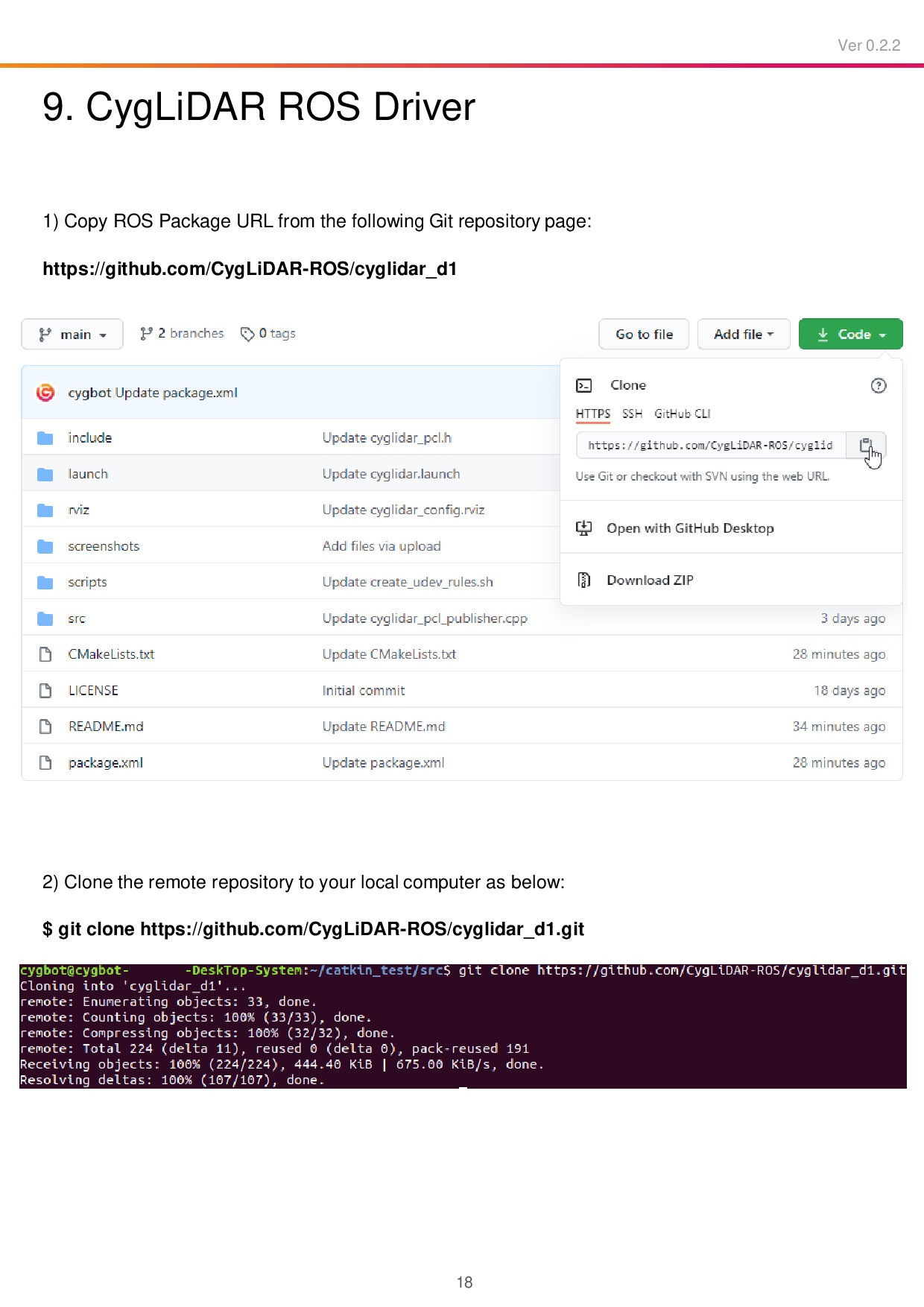
The package CygLiDAR-ROS/cyglidar_d1 is designed to visualize the 2D/3D distance dataset in real time. This is exactly what you are trying to achieve. Feel free to look at the source code for more details.
Undoubtedly, PointCloud2 supports 3D. I think this is what a point cloud is designed for!
PS: Given the explanation in the question, I strongly recommend going through ROS/Tutorials. These tutorials are easy to understand and are worth spending time, please!
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
