
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Yes, you can see here on the picture below, where the robot info goes.
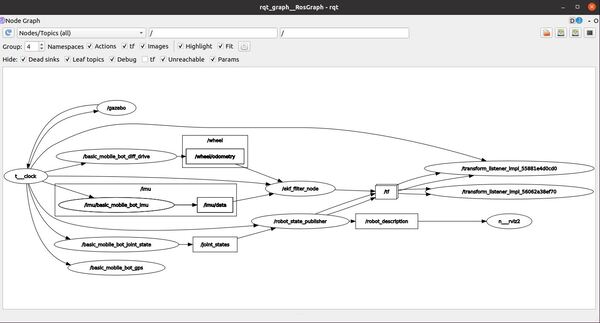
Yes, you can get it from /tf topic.
You can read more about the state estimate here, in Nav2 documentation:
map->odom can "jump" between values, but is usually more precise - it is provided by the positioning system (localization, mapping, SLAM).I don't know about any differences between the mentioned versions of ROS2 (Foxy, Galactic, Humble) - the interface is really similar or overall the same.
| | 2 | No.2 Revision |
Yes, you can see here on the picture below, where the robot info goes.
Yes, you can get it from /tf topic.
You can read more about the state estimate here, in Nav2 documentation:
The goal of odometry is to provide a smooth and continuous local frame based on the robot's motion. However, it will drift over time as errors accumulate. Odometry
On the other side, transformation map->odom can "jump" between values, but is usually more precise - it is provided by the positioning system (localization, mapping, SLAM).
I don't know about any differences between the mentioned versions of ROS2 (Foxy, Galactic, Humble) - the interface is really similar or overall the same.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
