
Problem with gmapping and rviz: "No map received" & "Fixed frame [map] does not exist"
Hi,
I am trying to run the map-building tutorial with gmapping and rviz. However I get some errors that I did not get before (and I do not recall changing anything significant).
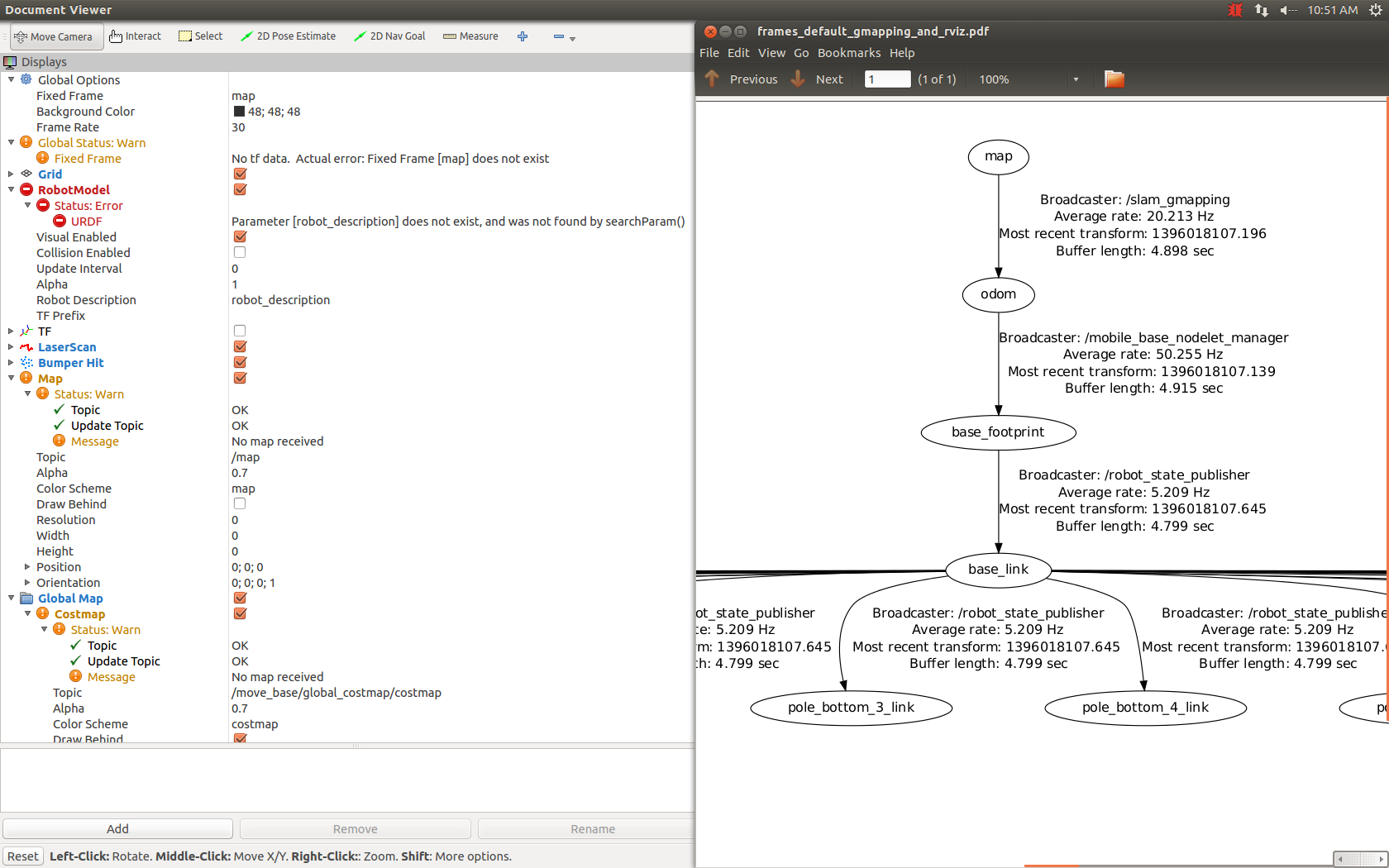
First of all, it says, "No map received", even though the right topics are subscribed to and the status of each topic is OK (see attached image file).
Secondly, under Global Options, the Fixed Frame, by default, is set to map. The Global Status then goes on to say that this frame does not exist, when, clearly, according to the tf-tree produced by rosrun tf view frames, it does!
Any help is appreciated :) Thanks!
Specifications: ROS Distribution - Hydro; OS Distribution - Ubuntu 13.04 Raring.
add a comment
