
Looking for steps to establish Publisher connection in ROS
My ROS client is having issues connecting Publishers to topics. Subscribers work flawlessly, and then Publishers get setUp, start listening on a Socket. The only ROS topic that is attempting to subscribe to a topic is /rosout, which calls requestTopic on rosout, receives the connection information, and then never attempts to connect to the Publishers. Can anybody assist me in trying to figure out why ROS is not attempting to connect to the Topic Publishers?
Thanks for your assistance!
Aaron
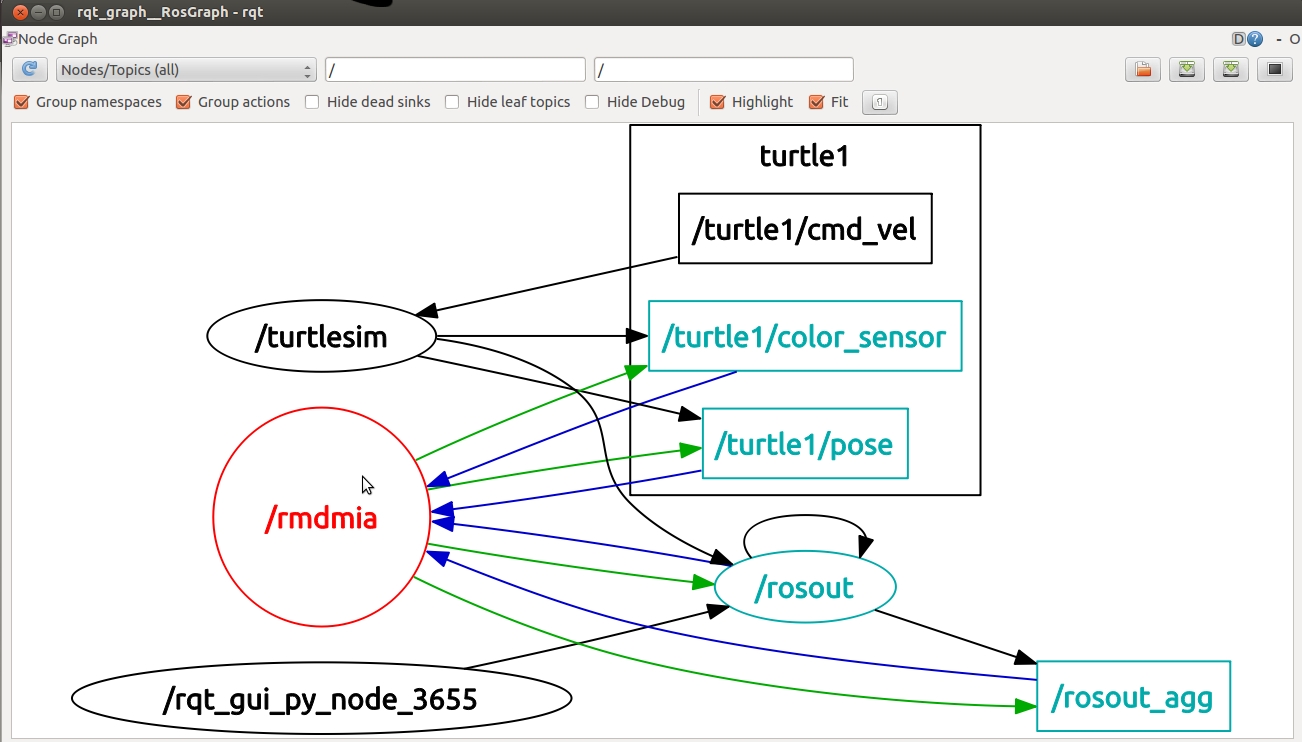 Response to comment: Yes, I am implementing my own TCPROS/UDPROS client in Java. The client is running locally. This is on turtlesim, all subscribers subscribe to /turtle1/color_sensor, /rosout, /rosout_agg, /turtle1/pose. Then the Publishers are initialized, and on the same topics call registerPublisher on each topic. ROS automatically calls requestTopic at startup on /rosout even without calling registerPublisher on /rosout (why?, this required writing specialized startup code due to how the initialization is started...), lastly, after the /rosout is responded to the subscriber requestTopic the subscriber is not connecting to the Publisher via TCPROS. I've attached a screenshot of rqt_graph, to add further confusion to the question...
Response to comment: Yes, I am implementing my own TCPROS/UDPROS client in Java. The client is running locally. This is on turtlesim, all subscribers subscribe to /turtle1/color_sensor, /rosout, /rosout_agg, /turtle1/pose. Then the Publishers are initialized, and on the same topics call registerPublisher on each topic. ROS automatically calls requestTopic at startup on /rosout even without calling registerPublisher on /rosout (why?, this required writing specialized startup code due to how the initialization is started...), lastly, after the /rosout is responded to the subscriber requestTopic the subscriber is not connecting to the Publisher via TCPROS. I've attached a screenshot of rqt_graph, to add further confusion to the question...

Are you implementing your own tcpros interface? If yes, what exactly are you doing. If no, what code/node setup do you use in ROS that doesn't work. Are you running locally or over the network?
@dornhege - I've replied to your comment below the original question, and included a screenshot of rqt_graph for further information.
I'm don't know the ros internals to make something out of that. Are you aware that there is a rosjava implementation?
I am aware there is a ROSJava implementation. Unfortunately, it does not meet the requirements of the system my group is building;)
You might consider installing Rosbridge and contacting it from java using websockets. All you need to do is to include websockets in your java project. An example of rosbridge can be found on this website (here implemented on javascript): http://rosbridge.org/doku.php?id=rosbridge_v2.0_example_commands
Thanks Mehdi, I appreciate your suggestion, and, rosbridge does not meet the requirements of the system my group is building. Our client will be highly efficient, very flexible, and work out of the box in autonomous robots, built by other robots, without the need for people in the middle.