
Control architecture survey

Dear all,
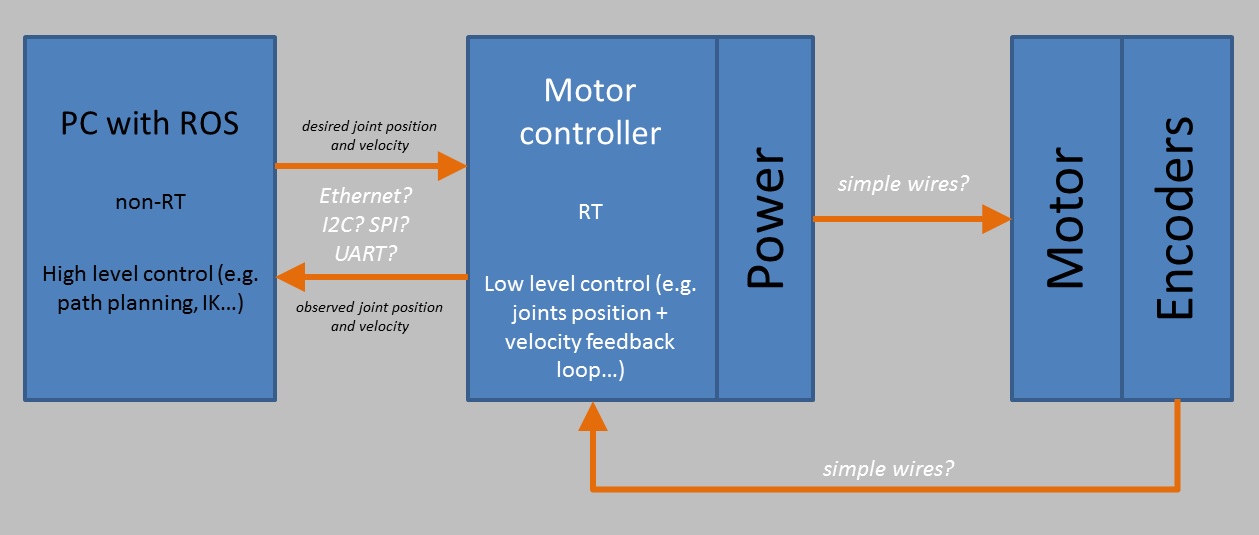
I am wondering what hardware tech is most used to interface with ROS. I have drawn a little diagram which I believe is typical of most ROS control architectures and I am wondering which particular technology you use for the items shown in white. The idea is to understand if there is a typical "kind of standard" control architecture. I guess this will be interesting for many among us.
Specifically:
- The communication between the ROS PC and the controller
- I expect most people use Ethernet, or I2C, SPI... But is it really the case?
- The motor controller
- I expect hobbyist use custom-made controllers or cheap ones from the internet and professionals use proprietary ones such as EPOS from Maxon... What do you use?
- The communication between the encoders and the ROS PC
- You also use Ethernet, or I2C, SPI?
I believe it would be great to indicate your skills level as well: whether you are a hobbyist, a researcher, or someone working in the industry...
Thanks,
Antoine.


From my point of view there is no clear answer besides: Whatever the hardware dictates. The one thing I'd change in your diagram: Encoders are usually not directly connected to the PC.
Yep you are right, I have updated the diagram accordingly. Thanks.
In our model, our encoders don't even directly connect to the motor controller. Point being, it's up to the designer of the robot and there are a lot of variables. When we first got started with ROS, it was the high level of abstraction that was difficult to digest. Start small!