
difference between octomap and voxel grid?

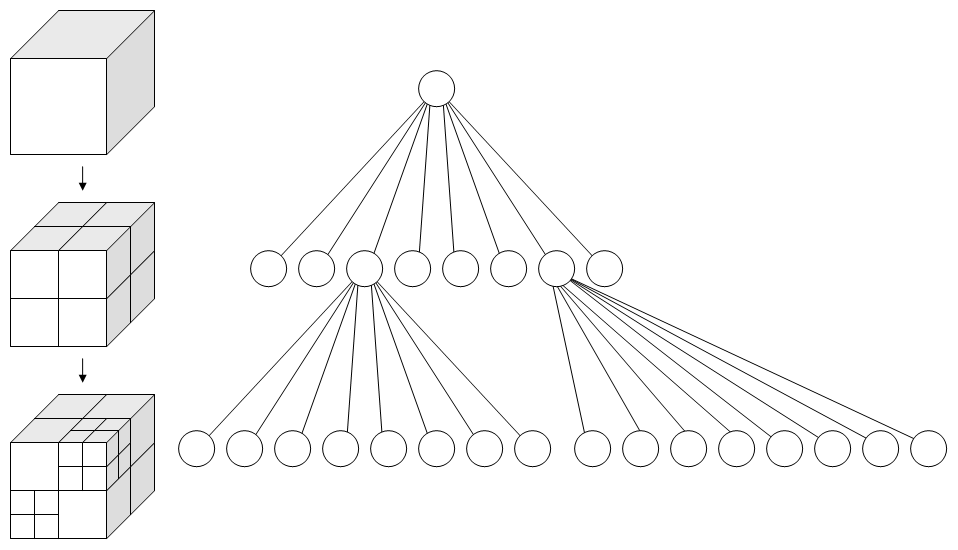
hello everyone, I am new in ROS, and I would like to know the defference betwen octomap and voxel_grid ? I have looking for information on internet but I have find the same information for both of them. I have seen these videos about octomap and voxel_grid on youtube ( watch?v=y5tGI3Fln_4 and watch?v=y5tGI3Fln_4 )
If someone can explain the defference to me, or guide me to a webpage ?
thank you,
Guillaume
add a comment

 )
)