
robot is not algined to the laser scanner frame
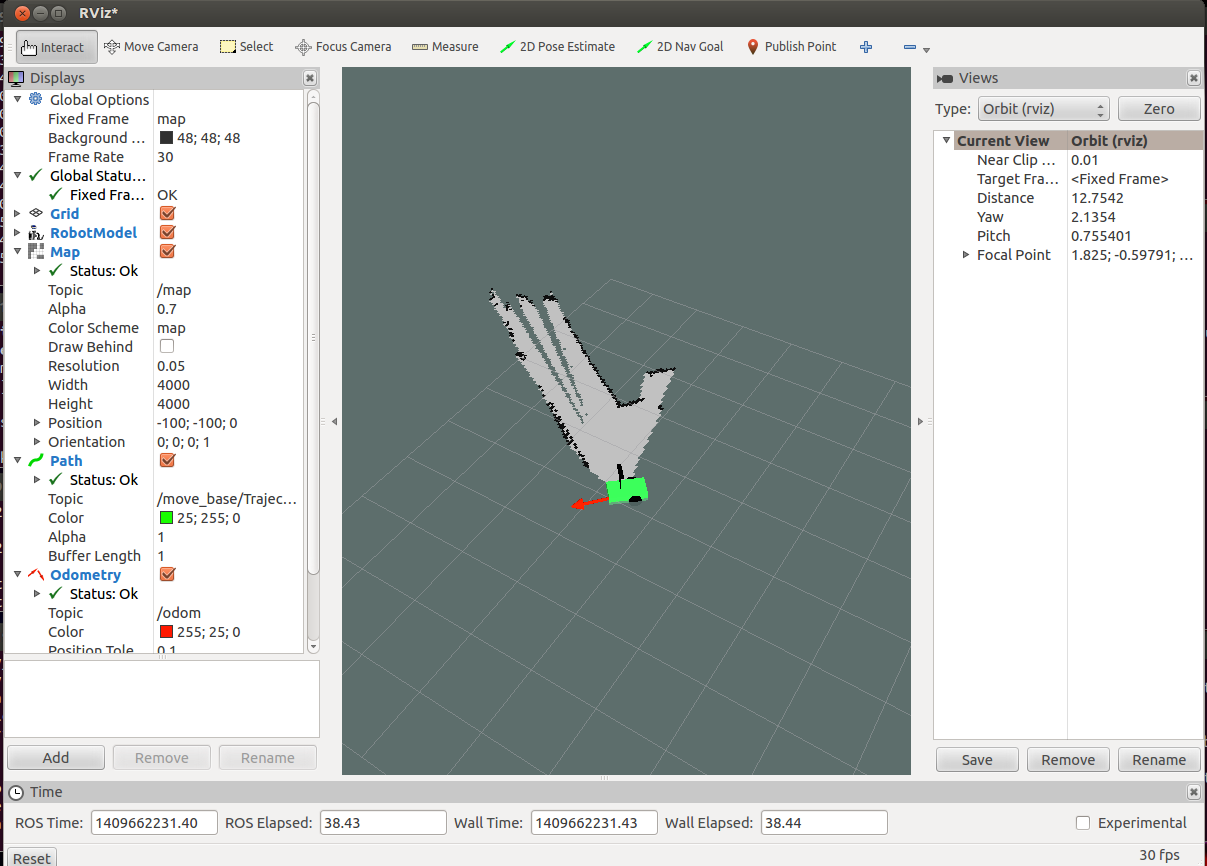
I have my own URDF file, when I try to do mapping using the slam_gmapping node, then open the rviz with the map and robot model, then I can see that what the actual laser scanner is seeing is exactly 90 degree offset to how the lase scanner is oriented in the simulation.
for more details please go through the screen shot attached:
Please find my URDF here. :
<robot name="my_robot">
<link name="base_link">
<visual>
<geometry>
<box size="0.6 0.35 0.15"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="white">
<color rgba="0.2 1 0.3 1"/>
</material>
</visual>
</link>
<link name="lwheel">
<visual>
<geometry>
<cylinder length="0.04" radius="0.1"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="base_to_lwheel" type="fixed">
<parent link="base_link"/>
<child link="lwheel"/>
<origin xyz="-0.1 -0.2 -0.025" rpy="1.5708 0 0"/>
<axis xyz="-0.1 -0.2 -0.025 " />
</joint>
<link name="rwheel">
<visual>
<geometry>
<cylinder length="0.04" radius="0.1"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="base_to_rwheel" type="fixed">
<parent link="base_link"/>
<child link="rwheel"/>
<origin xyz="-0.1 0.2 -0.025" rpy="-1.5708 0 0"/>
</joint>
<link name="fwheel_left">
<visual>
<geometry>
<cylinder length="0.05" radius="0.03"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="base_to_fwheel_left" type="fixed">
<parent link="base_link"/>
<child link="fwheel_left"/>
<origin xyz="0.22 -0.1 -0.095" rpy="1.5708 0 0"/>
</joint>
<link name="fwheel_right">
<visual>
<geometry>
<cylinder length="0.05" radius="0.03"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="base_to_fwheel_right" type="fixed">
<parent link="base_link"/>
<child link="fwheel_right"/>
<origin xyz="0.22 0.1 -0.095" rpy="-1.5708 0 0"/>
</joint>
<link name="camera_link">
<visual>
<geometry>
<box size="0.28 0.065 0.04"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<link name="scan_support">
<visual>
<geometry>
<cylinder length="0.36" radius="0.015"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black">
<color rgba="1 0.2 0.1 1"/>
</material>
</visual>
</link>
<joint name="base_to_scan_support" type="fixed">
<parent link="base_link"/>
<child link="scan_support"/>
<origin xyz="0.10 0 0.255" rpy="0 0 0"/>
</joint>
<joint name="base_to_scanner" type="fixed">
<parent link="base_link"/>
<child link="camera_link"/>
<origin xyz="0.10 0 0.455" rpy="0 0 -1.5708"/>
</joint>
</robot>
Any insights for what might be wrong here..?
Many thanks in advance.


What is the Reference Frame in "Grid"?
The reference frame in grid was <fixed frame="">