
base_scan observation buffer has not been updated
Hi, everyone
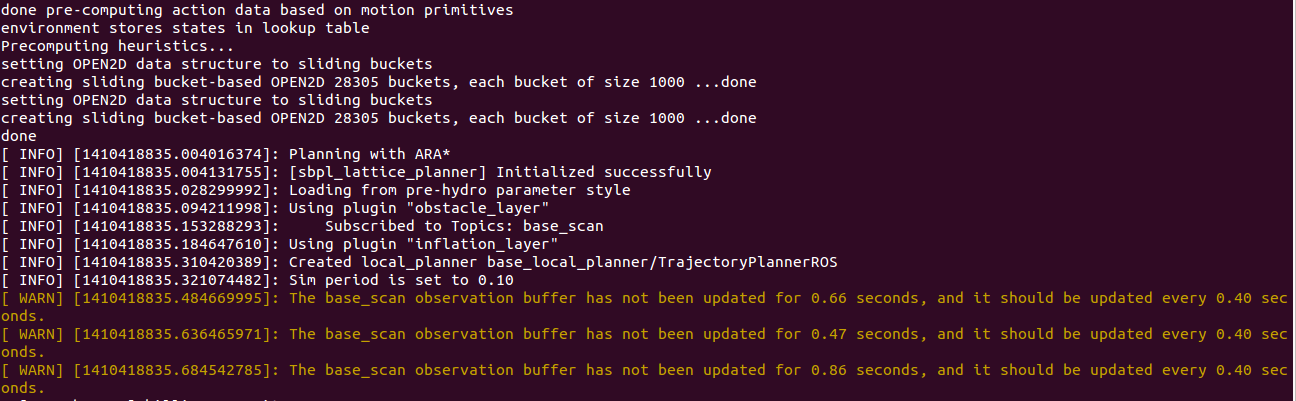
I am using Hokuyo UTM-30LX-EW for navigation. When I roslaunch .launch file for navigaiton, it always gives warning: The base_scan observation buffer has not been updated for 0.66 seconds, and it should be updated every 0.4 seconds. I am not sure what's wrong with it, and how to get rid of the warning? Thanks.
These are the yaml files:
local_costmap:
publish_voxel_map: true
global_frame: /map
robot_base_frame: base_footprint
update_frequency: 5.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 6.0
height: 6.0
resolution: 0.05
origin_x: 0.0
origin_y: 0.0
global_costmap:
global_frame: /map
robot_base_frame: base_footprint
update_frequency: 5.0
publish_frequency: 0.0
static_map: true
rolling_window: false
costmap_common_params:
map_type: voxel
origin_z: 0.0
z_resolution: 0.2
z_voxels: 10
unknown_threshold: 10
mark_threshold: 0
transform_tolerance: 0.3
obstacle_range: 3.0
max_obstacle_height: 2.0
raytrace_range: 5.0
footprint: [[0.176, -0.185], [-0.176, -0.185], [-0.411, 0.0], [-0.176, 0.185], [0.176, 0.185]]
footprint_padding: 0.00
inflation_radius: 0.55
cost_scaling_factor: 10.0
lethal_cost_threshold: 100
observation_sources: base_scan
base_scan: {data_type: LaserScan, expected_update_rate: 0.4, observation_persistence: 0.0, marking: true, clearing: true, max_obstacle_height: 1.0, min_obstacle_height: 0.08}

you should check the publish rate. Posting also the yaml file for the navigation stack will help for sure. Take a look also here http://wiki.ros.org/navigation/Tutori...
@rastaxe I have posted the yaml files. Can you tell me which parameter should be adjusted??
@tony if you get these warnings only at the beginning it is ok. Otherwise, you can try to change the expected_update_rate.