
Rviz "No planning library loaded"
Hi All,
I am following through the Moveit! Industrial Robot Tutorial and have got stuck at Part 3.1.2. I have copied the template launch file and minimally modified it for my own ends, but I have some questions:
There is a part of the <robot>_moveit_config moveit_planning_execution.launch that deals with the 'real' robot interface. Is this a node I need to write myself? I already have a means of publishing the joint angles of the robot to a sensor_msgs/JointState topic. My robot uses hydraulic rams so the joint angles are converted to ram lengths which are sent to a PID controller that takes in a sensor_msgs/JointState error and converts it to an effort that is then relayed to the robot valves. I'm a little lost about what sort of node I need to write to accept commands from the move_group node. As a starting point, I would like to have a planned trajectory as an input.
Here is the real robot-specific part of the launch file: <group unless="$(arg sim)"> <include file="$(find [robot_interface_pkg])/launch/robot_interface.launch" >="" <arg="" name="robot_ip" value="$(arg robot_ip)"/> </include> </group>
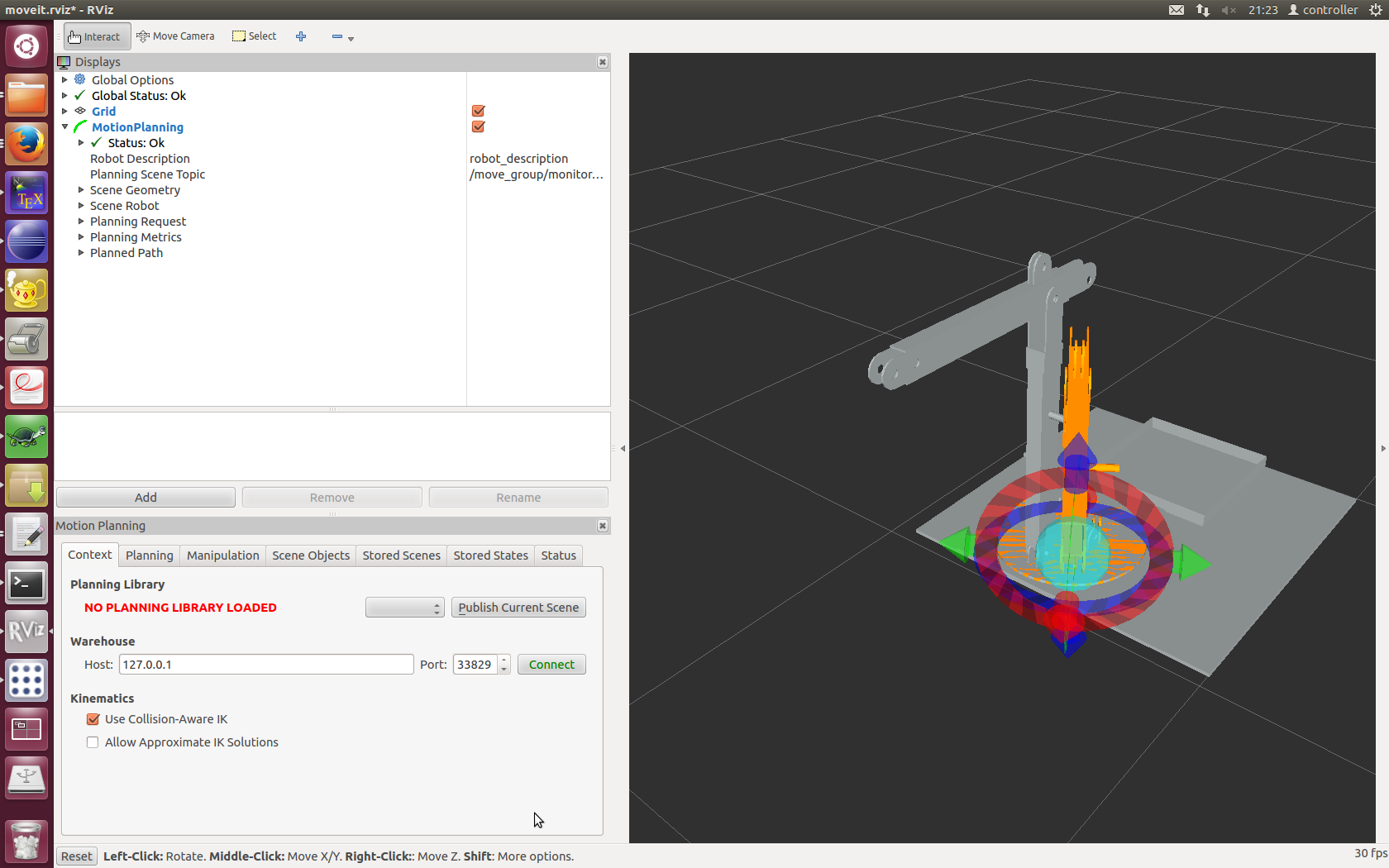
The other problem I have is that the inverse kinematics don't seem to work properly. While I can drag the arm around, I cannot plan a path from one point to another. RViz says there is no planning library loaded and on the console I get the following message:
[ INFO] [1410858518.526968209]: Constructing new MoveGroup connection for group 'xyz_control'
[ERROR] [1410858548.853118450]: Unable to connect to move_group action server within allotted time (2)
Here is my RViz screen as I see it. Note that the tutorial implies I should be able to drag the robot around and plan paths with it. However I cannot plan paths with it.
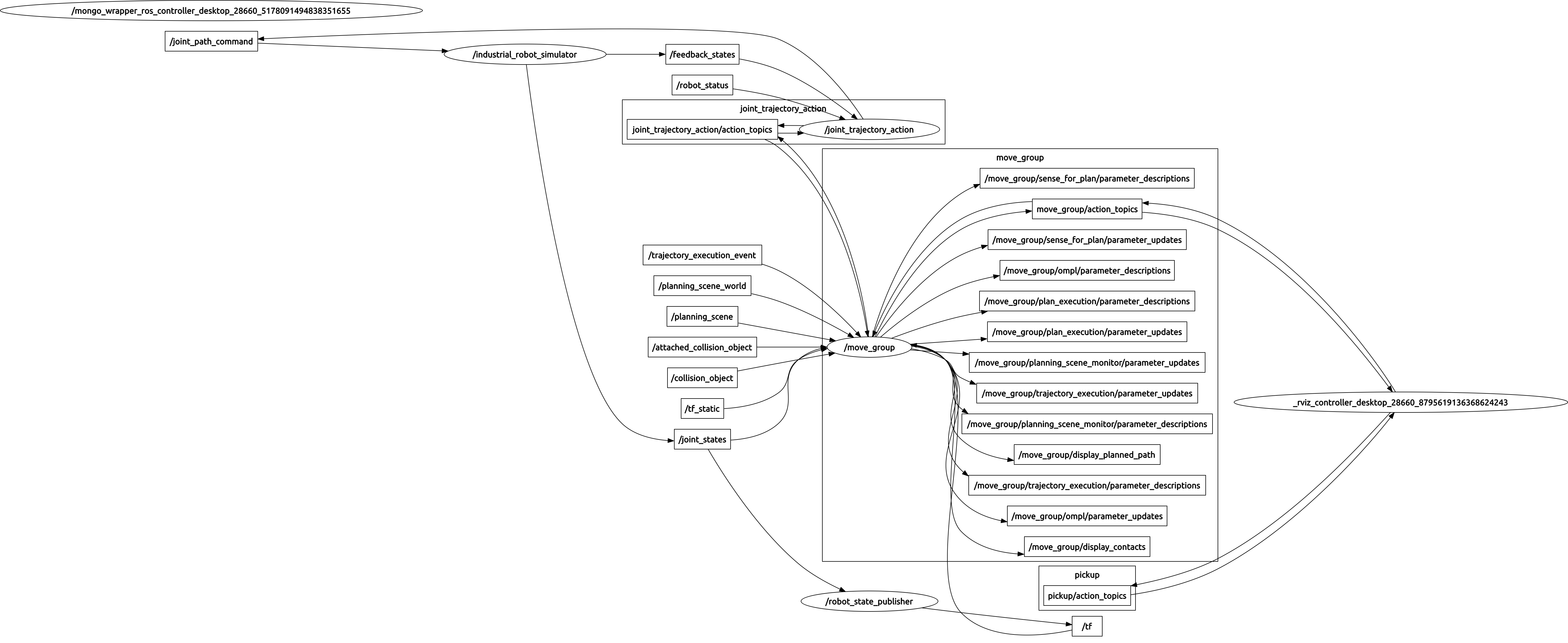
And here is my ROS graph from rqt_graph:
The lack of planning library could be an issue with changing from the 'fake' controller manager to the 'simple' controller manager. Is this an issue? Here's a diff of controllers.yaml between where RViz was able to find a planning library and when it wasn't.
@@ -1,9 +1,9 @@
<launch>
<!-- Set the param that trajectory_execution_manager needs to find the controller plugin -->
- <param name="moveit_controller_manager" value="moveit_fake_controller_manager/MoveItFakeControllerManager"/>
+ <param name="moveit_controller_manager" value="moveit_simple_controller_manager/MoveitSimpleControllerManager"/>
<!-- The rest of the params are specific to this plugin -->
- <rosparam file="$(find hyd_sys_complete_sldasm_moveit_config)/config/fake_controllers.yaml"/>
+ <rosparam file="$(find hyd_sys_complete_sldasm_moveit_config)/config/controllers.yaml"/>
</launch>
Note there is also an IKFast inverse kinematics plugin I have generated that has to fit into the mix somewhere. What is the best way to proceed? I want to be able to plan paths of the robot using Section 3 of the tutorial. There are a few pieces to this puzzle and I haven't quite worked out how they all go together at this stage.
Kind Regards Bart
