
Is PR2 also follow DH Convention?
I found weird things.
I open rviz for PR2.
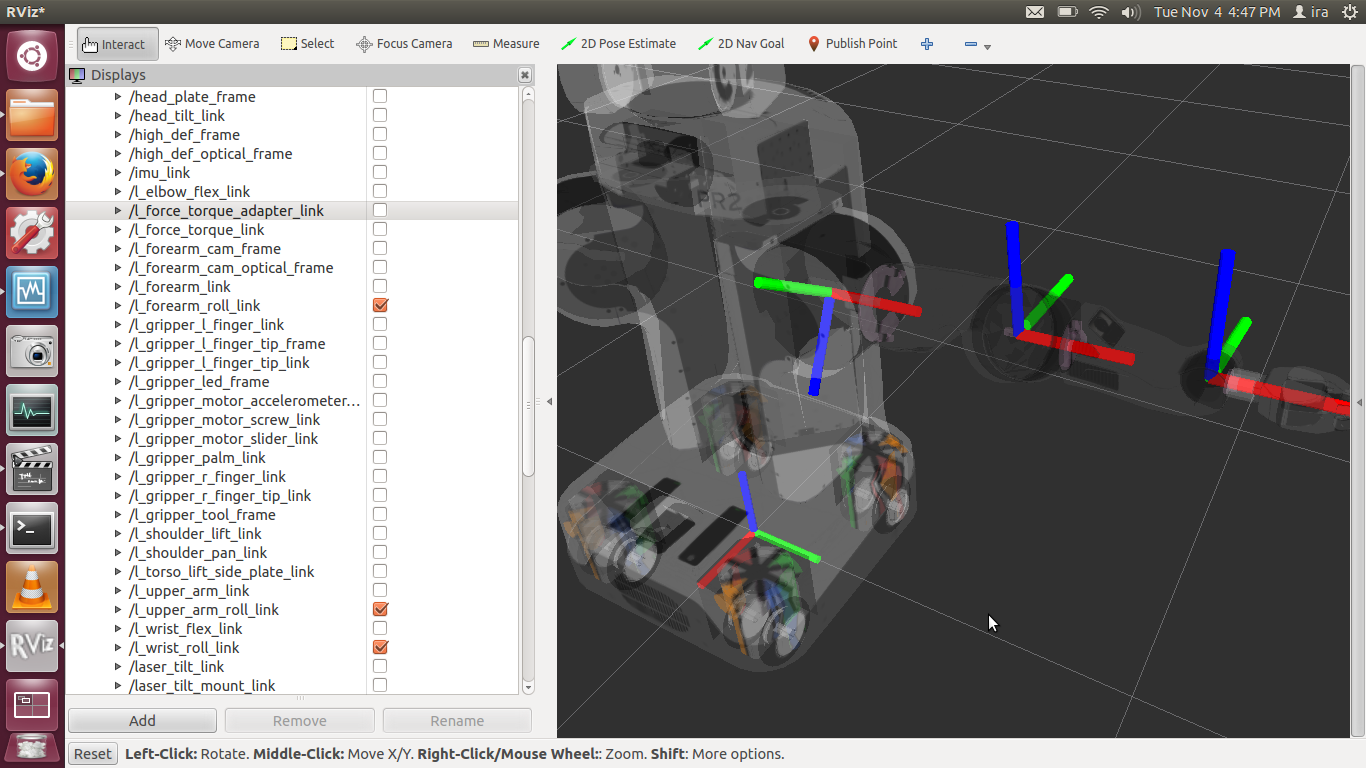
We can see that in /base_link, z axis is blue.
But why left arm joint axis is not blue but green?
Is PR2 follow DH convention?
If not, how to understand the coordinate design of PR2?
Thank you~
add a comment


