
Ar_pose doesn't recognize tag in tum_simulator. Please help.
Hello,
I would like to use ar_pose with image from ardrone camera. I don't have real quadrotor, I am using tum_simulator with Gazebo.
My problem is that ar_pose doesn't recognize tags in simulation, so I have few questions:
screens:
Gazebo and ar_tag which I add 
- Should I do camera calibration? (I don't have real cam, I am using cam which is in tum_simulator)
- What parameters should be set in ar_pose like: marker marker_width? (I am using tags in simulation)
- Why ar_pose doesn't recognize this tag?
EDIT: what I have done?
I have add two lines to launch file which is responsible for running Gazebo + tum_simulator + ardrone_autonomy
<remap from="/ardrone/camera_info" to="/camera/camera_info"/>
<remap from="/ardrone/image_raw" to="/camera/image_raw"/>
so when I launch this files I have above topics remapped: http://pastebin.com/vv0UpGRp
next I launch ar_pose:
<launch>
<node pkg="rviz" type="rviz" name="rviz"
args="-d $(find ar_pose)/launch/live_single.rviz"/>
<node pkg="tf" type="static_transform_publisher" name="world_to_cam"
args="0 0 0.5 -1.57 0 -1.57 world camera 10" />
<node name="ar_pose" pkg="ar_pose" type="ar_single" respawn="false"
output="screen">
<param name="marker_pattern" type="string"
value="$(find ar_pose)/data/4x4/4x4_19.patt"/>
<param name="marker_width" type="double" value="200"/>
<param name="marker_center_x" type="double" value="0.0"/>
<param name="marker_center_y" type="double" value="0.0"/>
<param name="threshold" type="int" value="100"/>
<param name="use_history" type="bool" value="true"/>
</node>
</launch>
RESULTS:
screen from rviz (simulation) 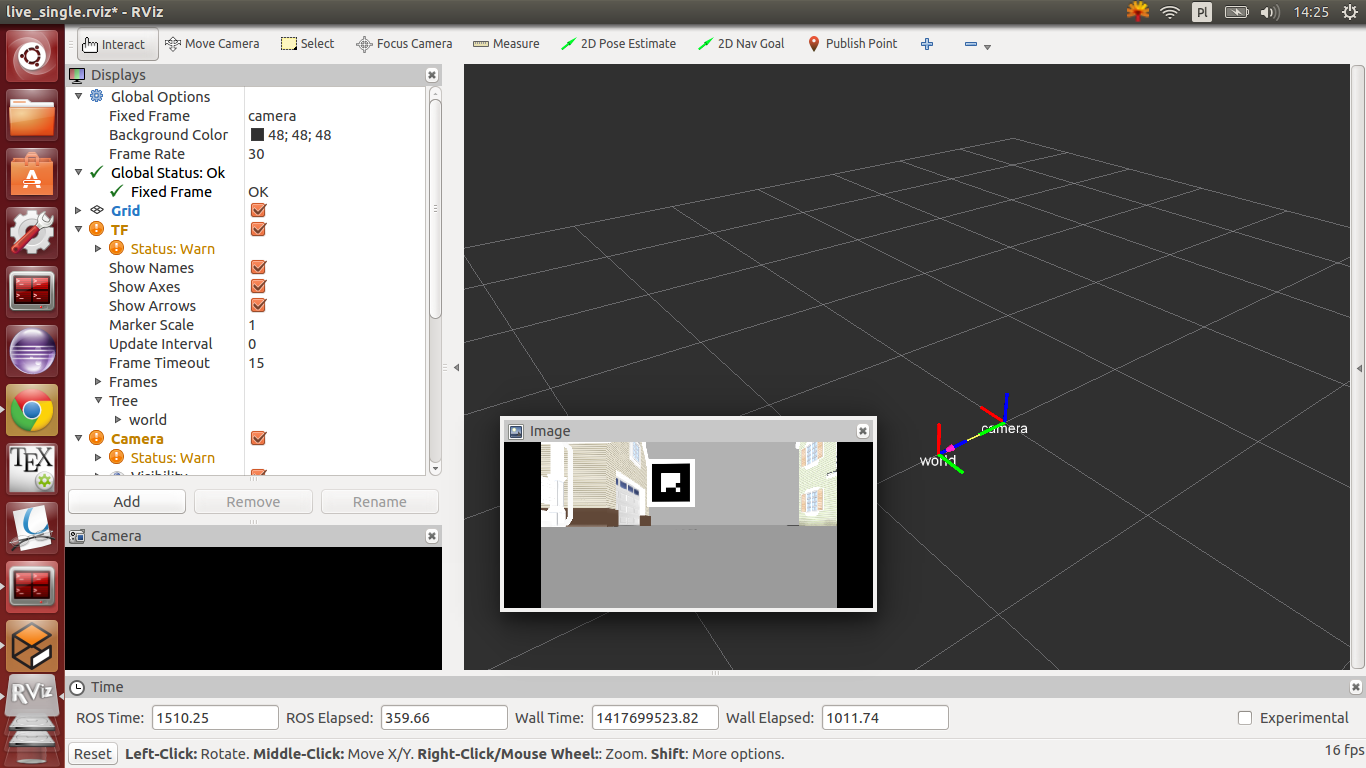
(screen1) 
Problem is that there is warming NO IMAGE RECEIVED and it is true. Preview from camera using 'CAMERA' gives black window, preview should be done with 'IMAGE'.
AR_POSE uses this 'camera style' preview, no 'image style'.
How to solve this problem?
(screen2) 
info from marker section:
basic_shapes/1
For frame [ardrone_base_frontcam]: No transform to fixed frame [camera]. TF error: [Could not find a connection between 'camera' and 'ardrone_base_frontcam' because they are not part of the same tree.Tf has two or more unconnected trees.]
(screen3) 
EDIT:
it started working! I change fixed frame to ar_marker and it seems to be working! :)
but it gives me message in terminal:
[ERROR] [1417704617.003409185, 3461.051000000]: Ignoring transform for child_frame_id "ar_marker" from authority "unknown_publisher" because of a nan value in the transform (0.609564 -0.180967 -3.568543) (-nan -nan -nan -nan)
[ERROR] [1417704622.185442670, 3463.722000000]: Ignoring transform for child_frame_id "ar_marker" from authority "unknown_publisher" because of a nan value in the transform (0.984986 -0.604149 -2.678788) (nan nan nan nan)
[ERROR] [1417704623.374384366, 3464.377000000]: Ignoring transform for child_frame_id "ar_marker" from authority "unknown_publisher" because of a nan value in the transform (0.590453 -0.226787 -2.891703) (nan nan nan nan)
(screen4) 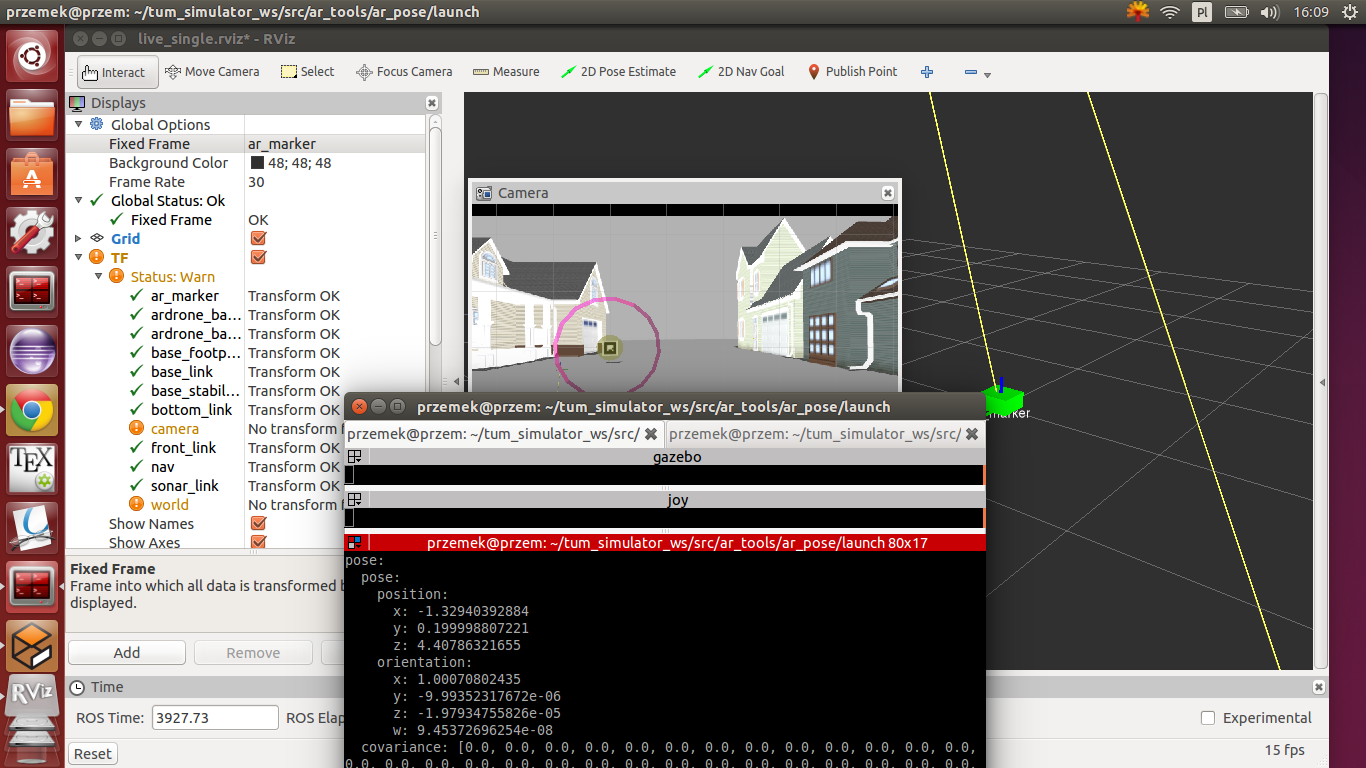


Cześć, używasz ar_sys czy ar_pose ?
Cześć :) wolałbym pisać po ang ponieważ jest większe prawdop. że ktoś jeszcze może mi pomóc.
I am using ar_pose from this localisation: https://github.com/xqms/ar_tools/tree... do you have any idea?
nie ma sprawy. And i tried to use ar_pose but it was a little difficult to setup and it seems as if maintenance hasnt been done in a while . Not sure what changes where made on the fork you are using though. Have you looked at ar_sys? Just started to set it up myself
I haven't heard about this package before. You are using real camera or camera in gazebo simulator? Everything works fine?
Some time ago I found this repository: http://wiki.ros.org/ar_track_alvar
I have calibrated ar_pose to my cam in laptop so I would rather don't change repository.