Doc: sensor_msgs..LaserScan has explanation for all the variables.
Looking at the code Publish_a_LaserScan_Message will gives good picture of variables.
laser scanner view of hokuyo URG-04LX-UG01 laser scanner
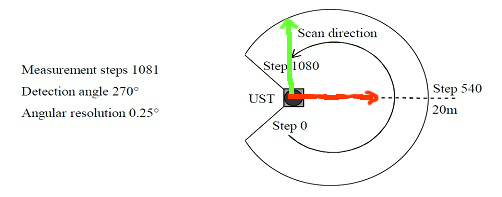
red,green are x,y-axes
Values for above scanner
angle_min= -135 * (pi/180); //angle correspond to FIRST beam in scan ( in rad)
angle_max= 135 * (pi/180); //angle correspond to LAST beam in scan ( in rad)
angle_increment =0.25 * (pi/180); // Angular resolution i.e angle between 2 beams
// lets assume sensor gives 50 scans per second. i.e every 20 milli seconds 1 scan with 1081 beams.
// Each beam is measured in (20 ms/ 1081 ) ~ = 0.0185 ms
time_increment = (1 / 50) / (1081);
scan_time = ; // scan is collected at which time
range_min =0 ; // in meters
range_max = 20; // scan can measure upto this range
// ranges is array of 1081 floats for each laser beam
ranges[0] = //distance measure corresponds to angle -135 deg
ranges[1] = //distance measure corresponds to angle -134.75 deg
.
.
.
ranges[1080] = //distance measure corresponds to angle +135 deg
//To understand Intensities
//if a laser beam hits reflective surface like glass it will have intensity 1.
//And if beam hit some surface which absorbs laser , then intensity is zero.
//Middle values are different surfaces in between.
Header header # timestamp in the header is the acquisition time of
# the first ray in the scan.
#
# in frame frame_id, angles are measured around
# the positive Z axis (counterclockwise, if Z is up)
# with zero angle being forward along the x axis
float32 angle_min # start angle of the scan [rad]
float32 angle_max # end angle of the scan [rad]
float32 angle_increment # angular distance between measurements [rad]
float32 time_increment # time between measurements [seconds] - if your scanner
# is moving, this will be used in interpolating position
# of 3d points
float32 scan_time # time between scans [seconds]
float32 range_min # minimum range value [m]
float32 range_max # maximum range value [m]
float32[] ranges # range data [m] (Note: values < range_min or > range_max should be discarded)
float32[] intensities # intensity data [device-specific units]. If your
# device does not provide intensities, please leave
# the array empty.
Obstacle distance calculation is easy
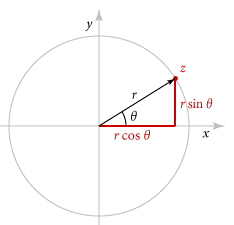
if r, θ are range and angle from one scan laser scan obstacle is at (x,y) = ( rcosθ, rsinθ ) in laser frame.
To make sense about θ , here imagine your laser has 180 deg view and now looking towards x-axis and ray along postive y-axis is +90 degress and negative y-axis is -90 degree.
agnle_min = -90
agnle_max = 90



