
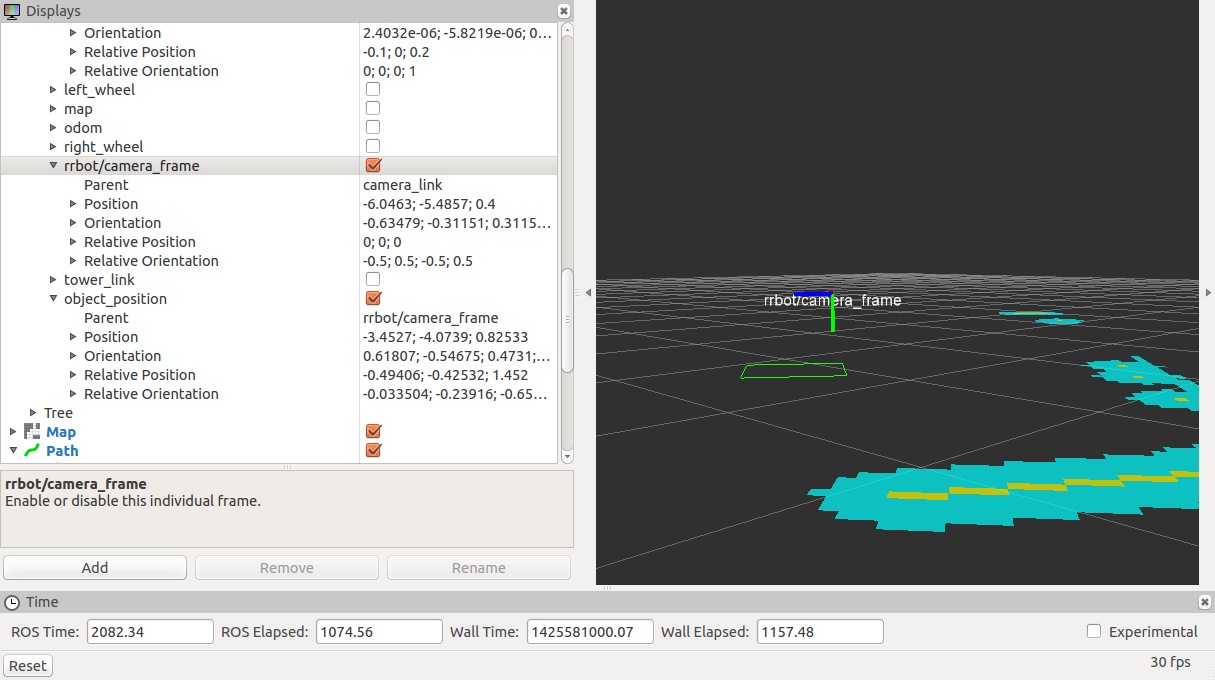
mystery of the missing transform in rviz
Why is there not a line from camera_frame to object_position
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Why is there not a line from camera_frame to object_position
I believe this is related to a configuration file that does not match my target marker specs.
Is the Show Arrows checkbox checked for the TF display in RViz?
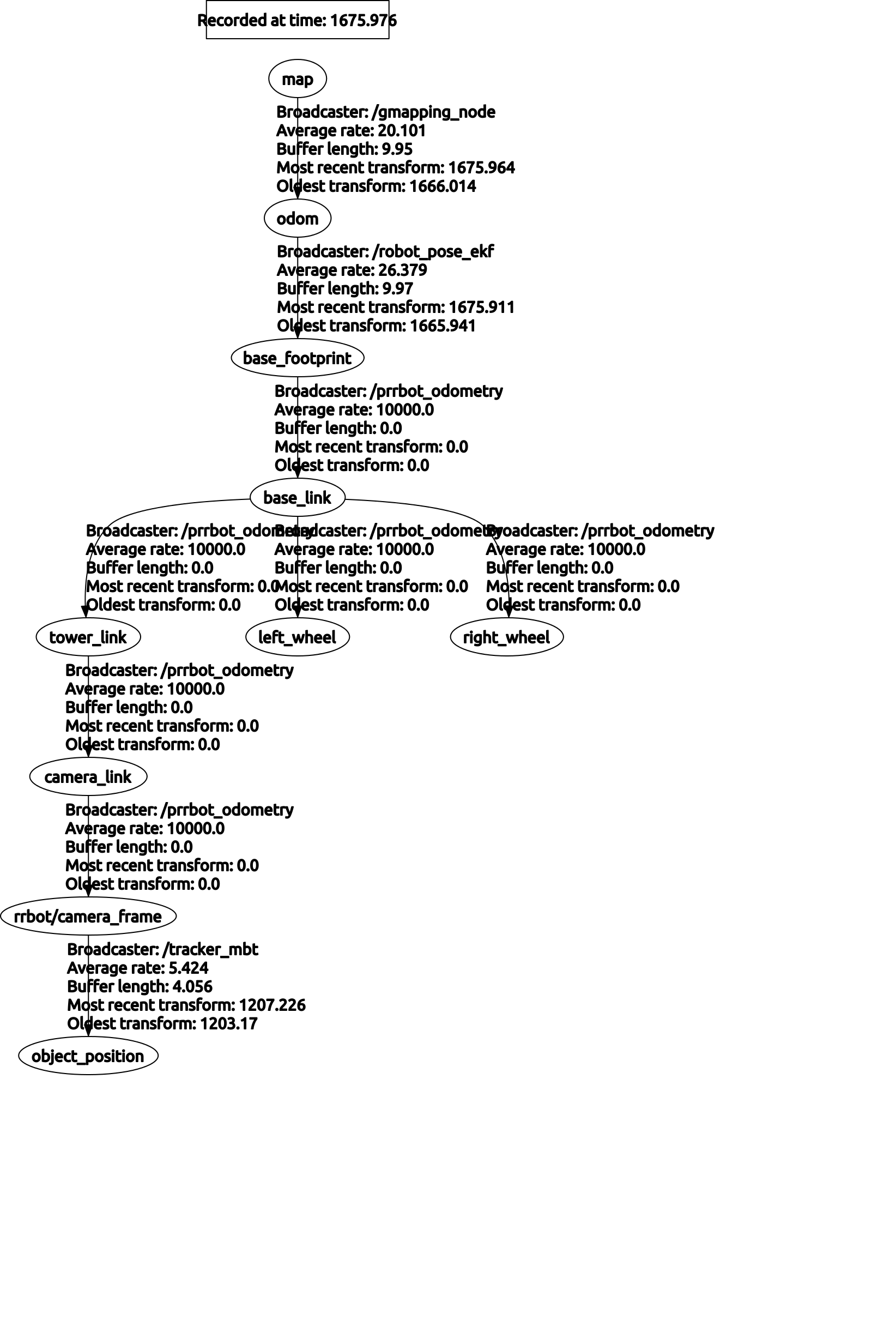
The object_position transform has a much older timestamp than the rest of the transforms.
odom: Most Recent: 1675.964
base_footprint: Most Recent: 1675.911
object_position: Most Recent: 1207.226
I think the default timeout for frames in rviz is 10 seconds, and in this case the object_position transform is more than 400 seconds out of date.
The tracker_mbt node clock seems to be different than the rest of the system.
Asked: 2015-03-05 15:24:03 -0600
Seen: 810 times
Last updated: Mar 07 '15
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.