
Why does my ikfast solver work outisde of MoveIt! but not within?
Hi, I'm steadily making progress with my project to control a 3DOF arm but there is this problem that been annoying me for the last couple of days.
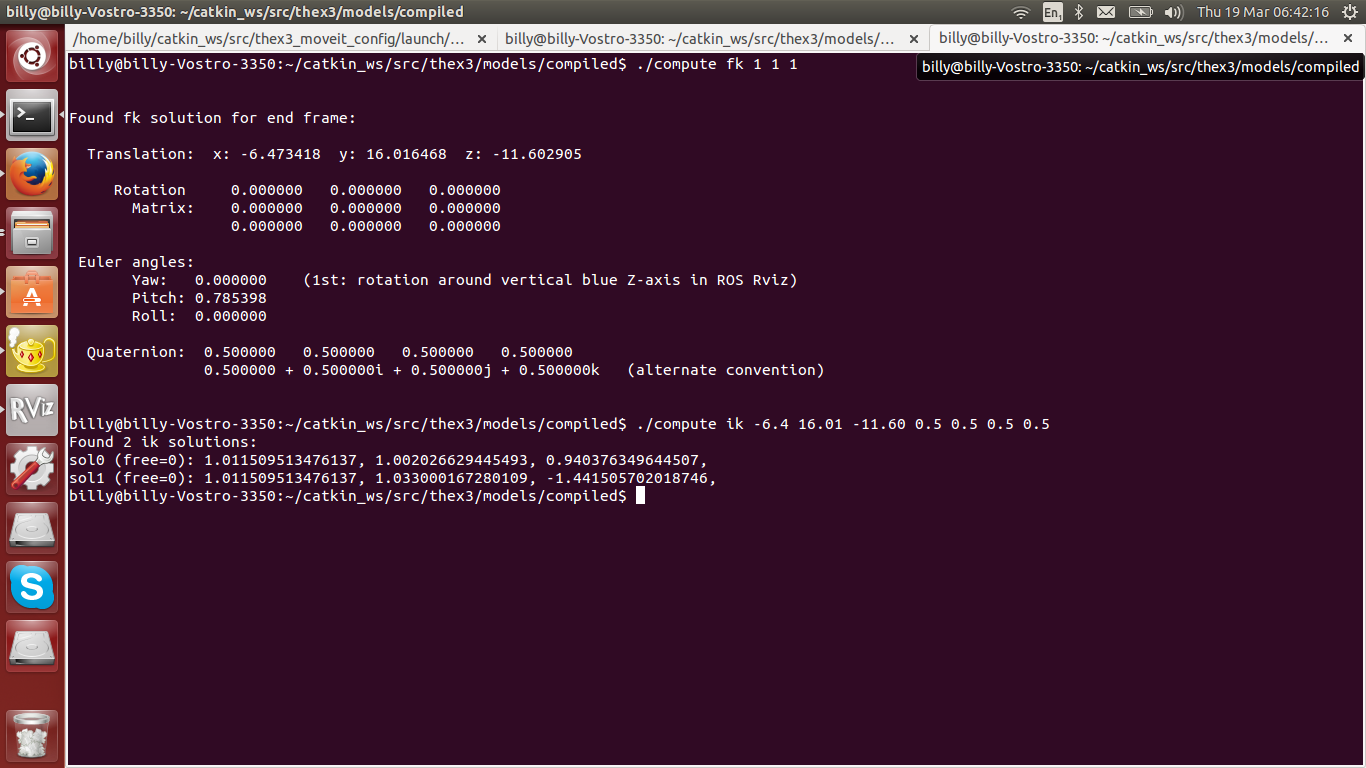
I'm trying to make a ikfast plugin for MoveIt! following the official tutorial. Everything seems to be working well, I test the solver using the compute program as instructed here (section 6) and everything seems to be working fine. I first test by using the fk solver, I then use the position returned by the fk solver to test the ik solver. As you can see, it seems to work well.
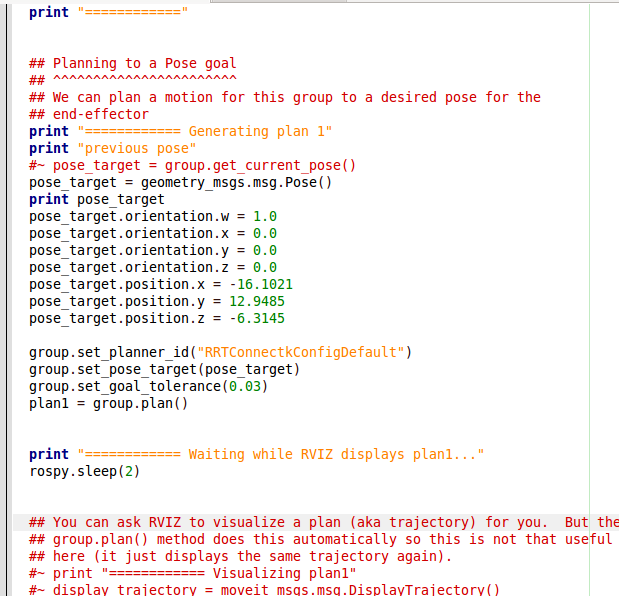
When I proceed to build the moveit plugin however and attempt to move the robot arm in a python script, the planning fails - as shown below. I've tried everything, I've tried setting the tolerances higher, I've tried using the same pose returned by get current pose. Nothing seems to work.

Here is the code I'm using:
Does anyone know what the problem might be? I'm kind of stuck at the moment.
Billy
ifast plugin tutorial: http://wiki.ros.org/Industrial/Tutori... python commander tutorial: http://docs.ros.org/indigo/api/pr2_mo...
