
why tf_monitor shows unknown_publisher
When I tf_monitor my frames, I saw all my frames were published by unknown_publisher. Could anyone please give me an idea how that usually happens, and how to solve it?
Also, I wonder whether it has anything to do with my strangely behaved AMCL, which seems to update the robot location only by /odom, and did not care about the laser scan (because laser scan does not align to the map). Thank you.
RESULTS: for all Frames
Frames:
Frame: base_link published by unknown_publisher Average Delay: 0.0187717 Max Delay: 0.0346738
Frame: left_back_wheel published by unknown_publisher Average Delay: 0.0250101 Max Delay: 0.0499581
Frame: left_front_wheel published by unknown_publisher Average Delay: 0.0250121 Max Delay: 0.0499596
Frame: odom published by unknown_publisher Average Delay: 0.0589457 Max Delay: 0.109153
Frame: right_back_wheel published by unknown_publisher Average Delay: 0.0250131 Max Delay: 0.0499602
Frame: right_front_wheel published by unknown_publisher Average Delay: 0.0250138 Max Delay: 0.0499608
Frame: rplidar published by unknown_publisher Average Delay: -0.499657 Max Delay: 0
All Broadcasters:
Node: unknown_publisher 86.3553 Hz, Average Delay: -0.278273 Max Delay: 0.109153


{kind=link}
Hi, did you find an answer?
unfortunately no
I'm getting a similar thing... how do I find out who the 'unknown_publisher' is?
do you have the node robot_publisher working in your project?
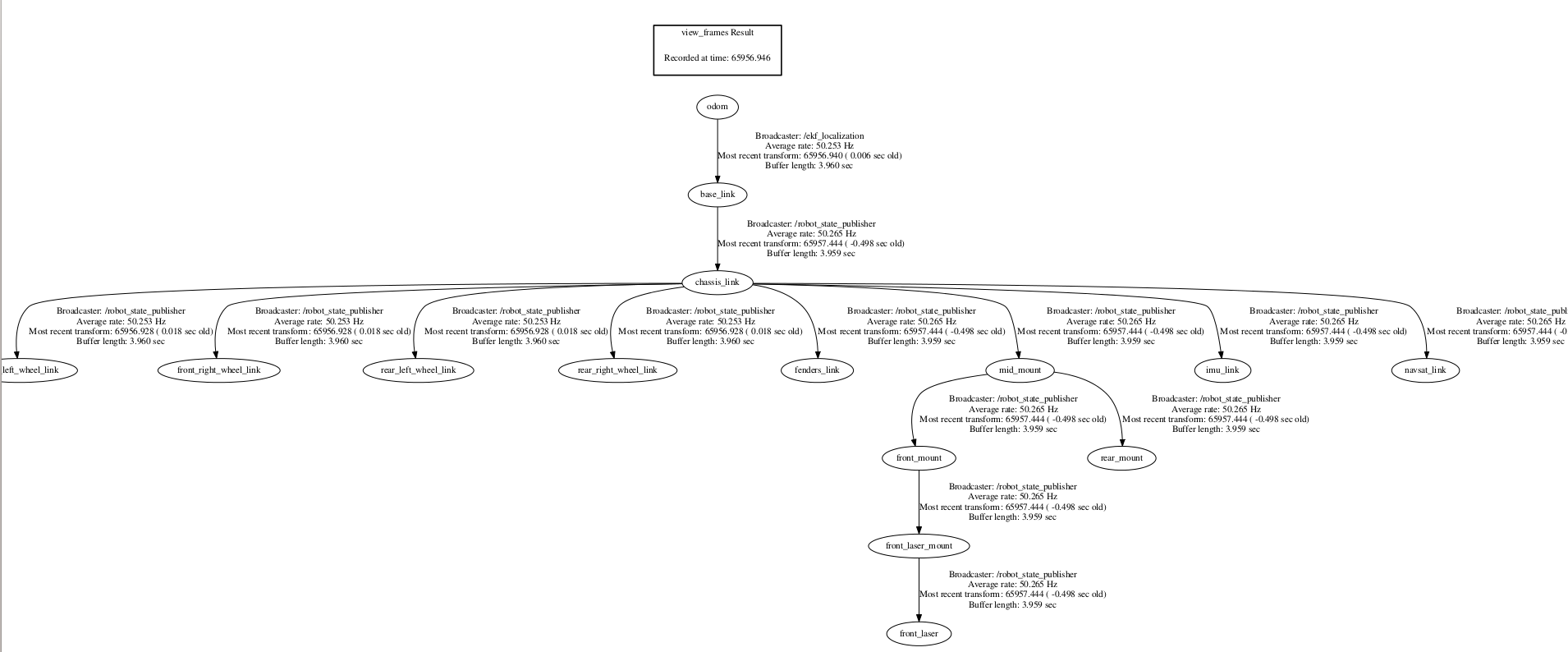
Best if you post your tf_frame pdf file.
I am running on turtlebot, using robot_state_publisher. Looking at the frames.pdf file generated it appears that the broadcaster for the Odom frame is the mobile_base_nodelet_manager. I will look into that more closely. What I don't understand is why it says unknown_publisher in the error message.
Please post your frames.pdf. Otherwise no one can understand what is happening there. A picture is 10000 or more words worth