
slam mapping not spliced well, help!
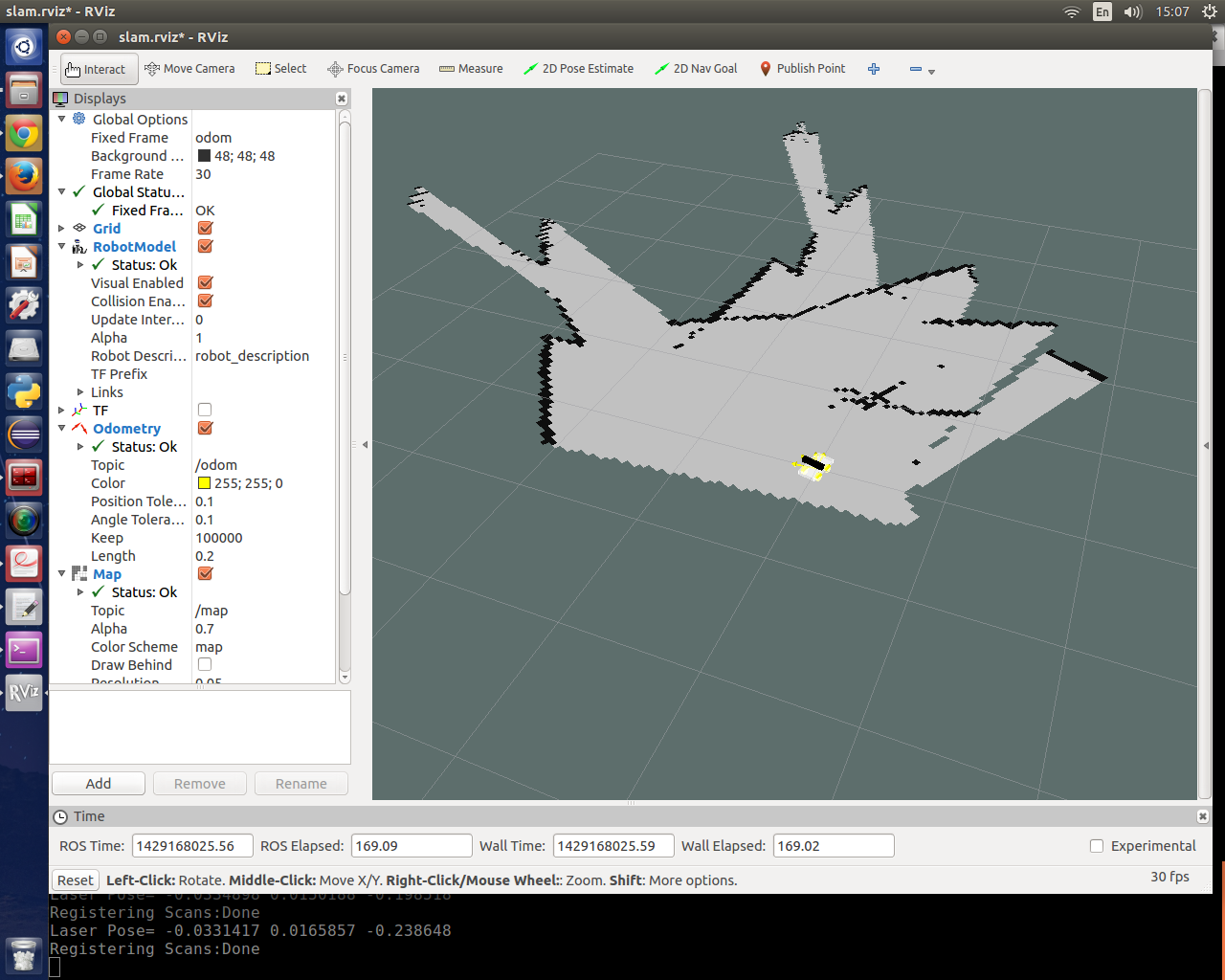
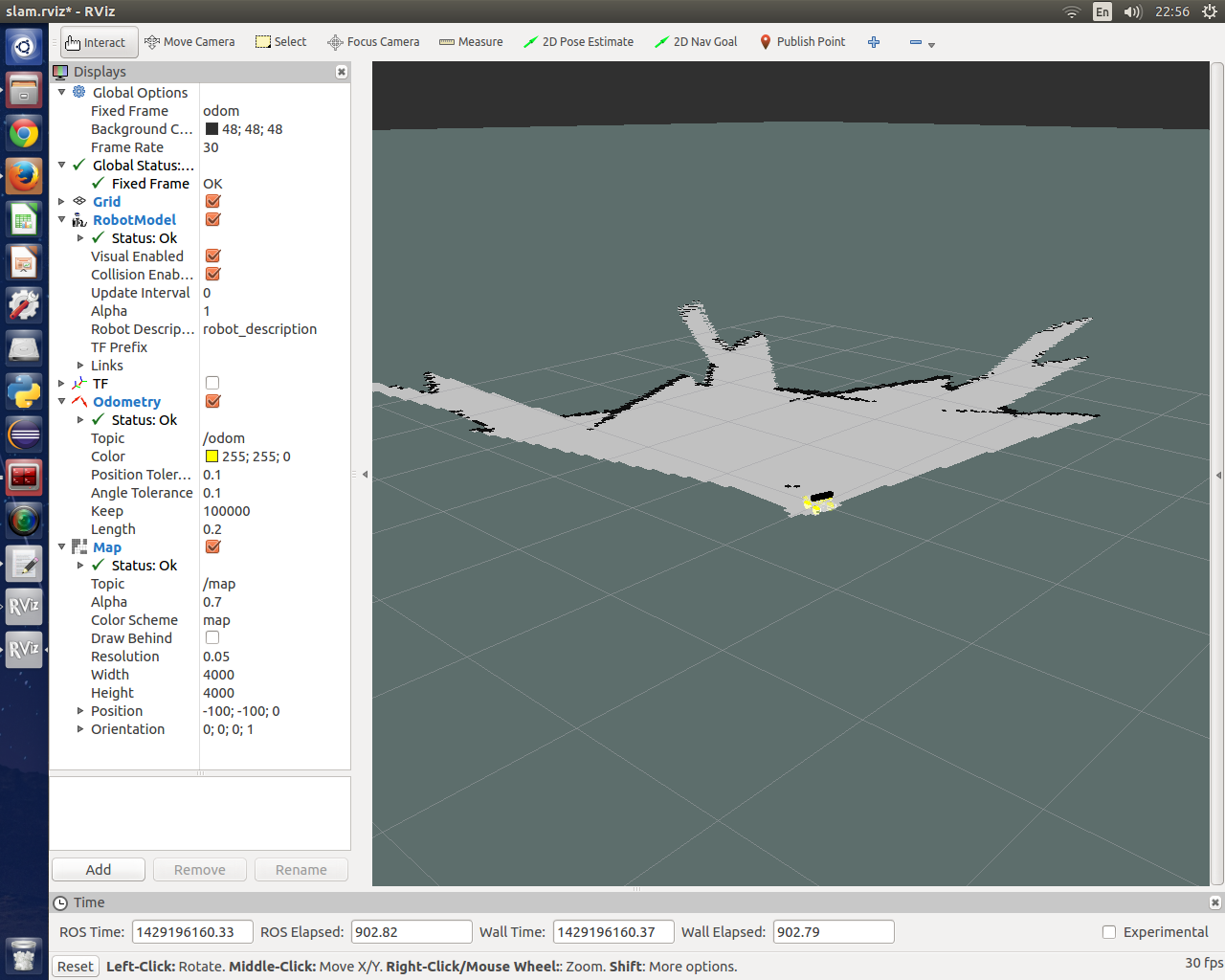
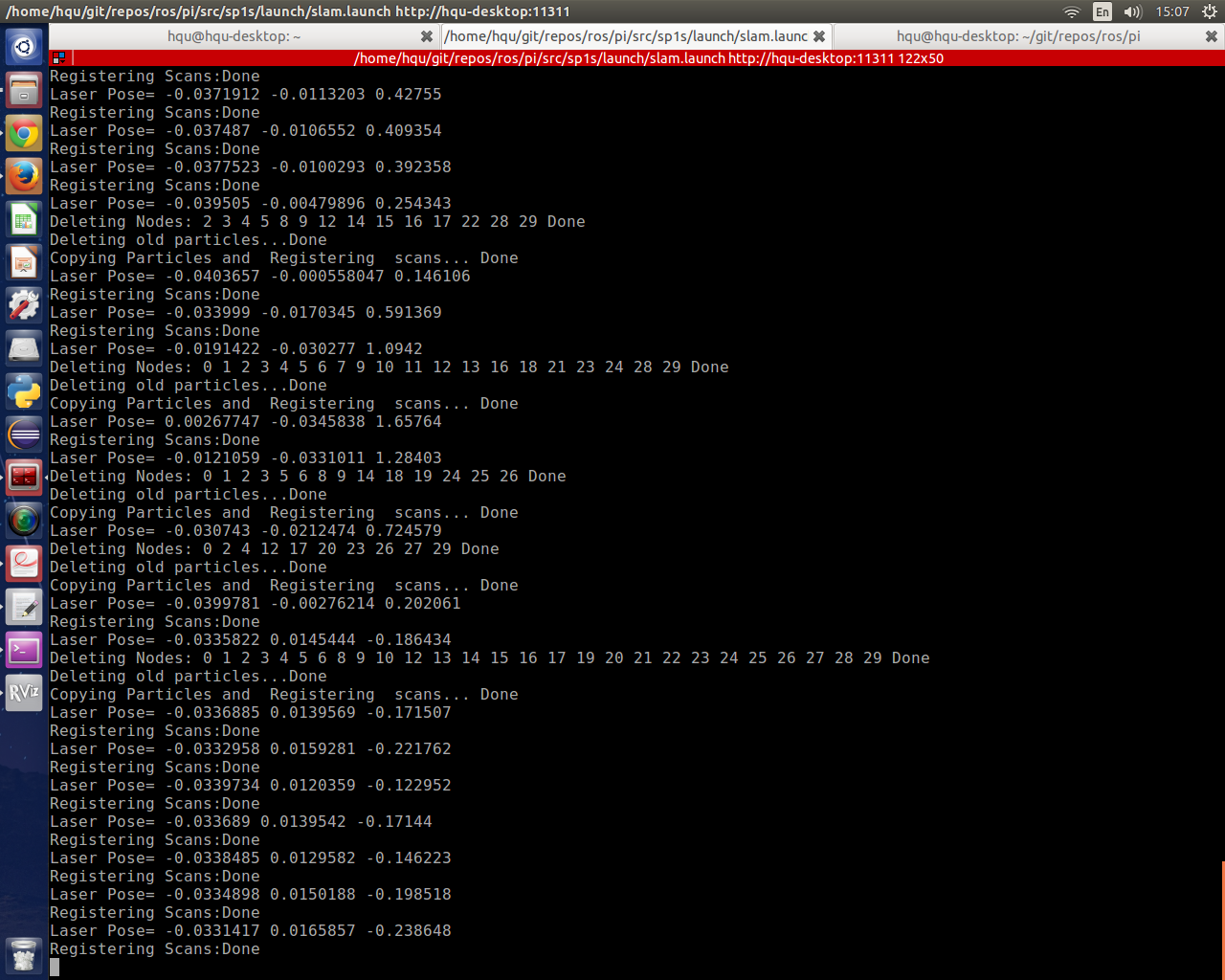
I'm using Xtion pro live on the RaspBerry pi. Gyroscope and compass also working very well.ROS mastered on a PC. base_control can publish orientation and position pretty good and visualized on the Rviz. depthimage_to_laserscan,gmapping nodes are publishing message on the wire. The first frame map was good. I manually rotate the robot which had the Xtion pro live attached on it. The map coming later looked not spliced very well :( The robot on the Rviz was little bit jumping, sounds like changing the pose by the ROS. I think its the base_control's job to publish the pose via odom topic, am I right? Is there any node matching the position in background?
The map is repeating the same pattern.
Is it possibly caused by system time synchronization issue?

Hi @Steven Qu I'm working on a similar project & set up. I wonder if you could help on getting gmapping working? At the moment I'm getting problems described [here](http://answers.ros.org/question/207343/gmapping-setup-problem/ did you have this issue?