
freenect_launch registration offset

Hi,
For a month now I cannot detect the kinect1 (xbox 360) with openni or openni2 so I had to switch to freenect (Ubuntu14.04 and ROS Indigo).
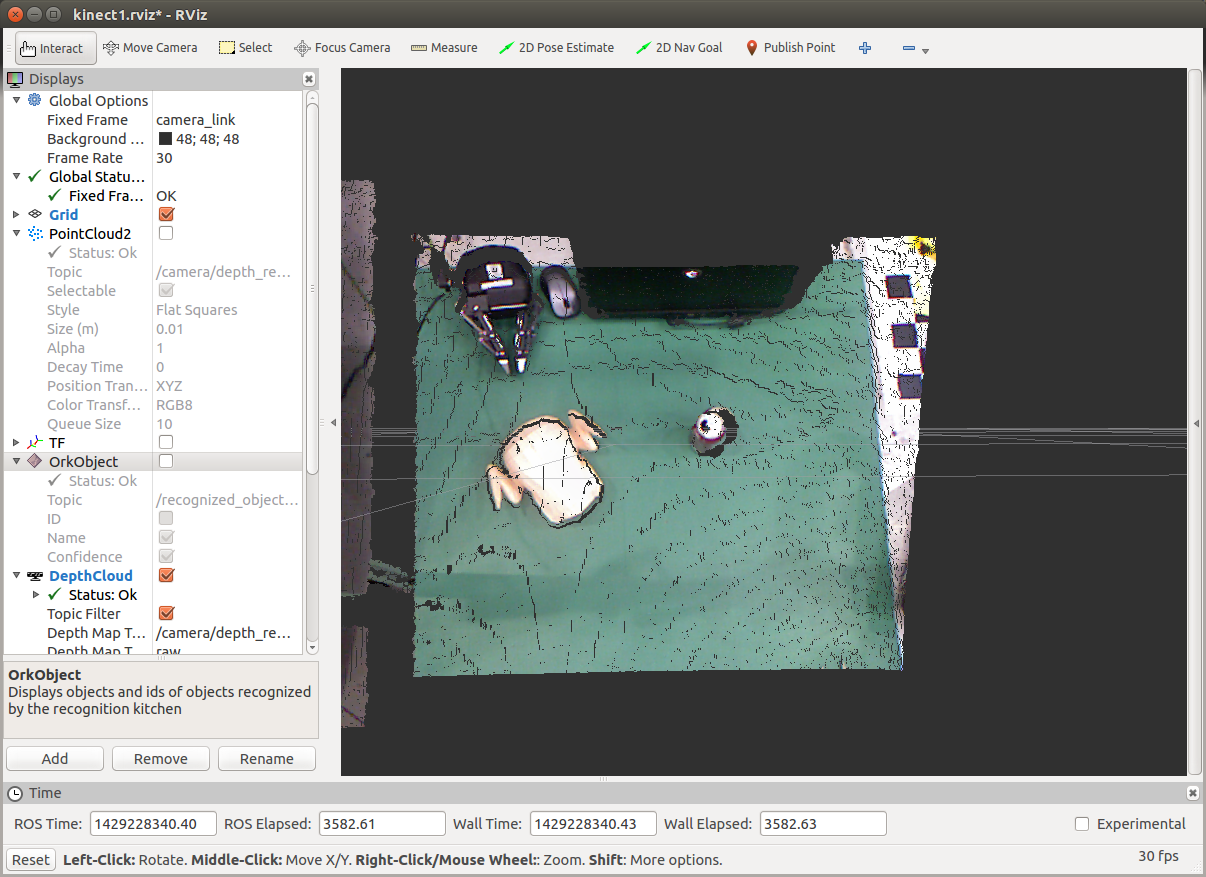
But the registered pointcloud seems really wrong (cf screenshot below, contours of coke can and fake bird do not match 3D data).
I'm running freenect using freenect.launch and putting depth_registration to true. I'm displaying the registered pointcloud using DepthCloud plugin. I provide /camera/rgb/image_color and /camera/depth_registered/image_raw as input.
I tried to calibrate the kinect but I cannot get rid of this registration error. Does anybody have an idea ?
Any help would be really appreciated, Thanks!
add a comment
