
gmapping localization information
Hello ROS community,
Since gmapping is a SLAM algorithm, I would like to use both the map and the localization being computed by this algorithm. From what I have seen so far, gmapping only publishes the /map and does not provide any such localization information (i.e. an estimate of the robot pose). My question is this:
Is the gmapping package in ROS performing SLAM? If so, can we get localization information directly from it, rather than having to use other packages like amcl, robot_pose_ekf and robot_localization?
I need to have a fairly accurate robot pose estimate within the map that is the result of SLAM gmapping, rather than using the robot pose estimated from the odometry data. I need to use this in an exploration algorithm.
Also, I seem to have a localization problem in gmapping since if the robot is rotated by 180 degrees in an alley, the resulting map is a mess as shown below: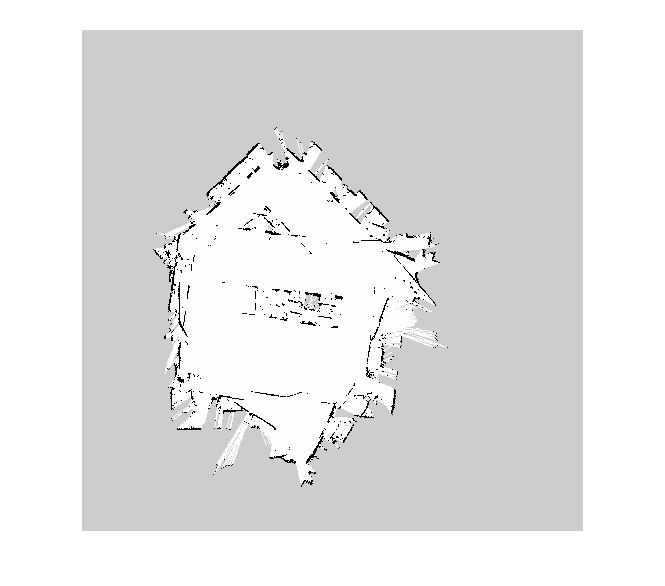
I appreciate any help. Thank you!
RND


Hello, did you find the answer, i have the same concern as you have :))