
SBPL_Exception* error while using SBPLLatticePlanner in ros indigo

Hi all,
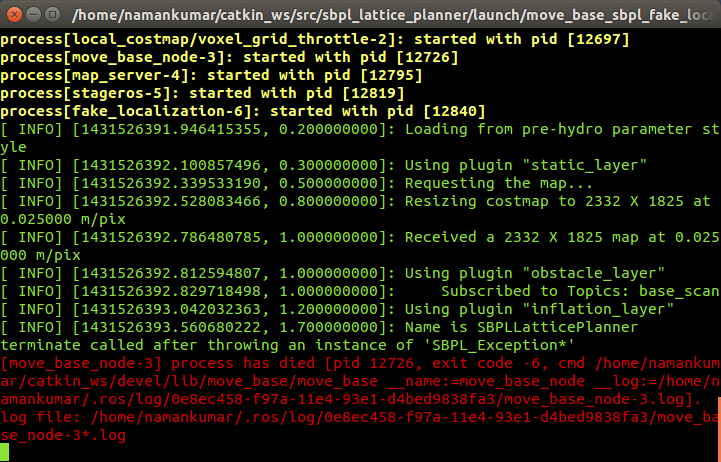
I am planning to use SBPL Lattice Planner as a Global Planner. I have sbpl and sbpl_lattice_planner set up in ROS Indigo. Then when I run roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch, I get the following runtime error:
Also, I have followed this to make all the necessary changes. Does anyone has any idea about what is causing this error and how can it be solved?
Thanks in advance.
Naman Kumar

Have you set
.mprimfile for yourmove_basenode correctly?