
Local costmap not centered on robot [closed]


Hello,
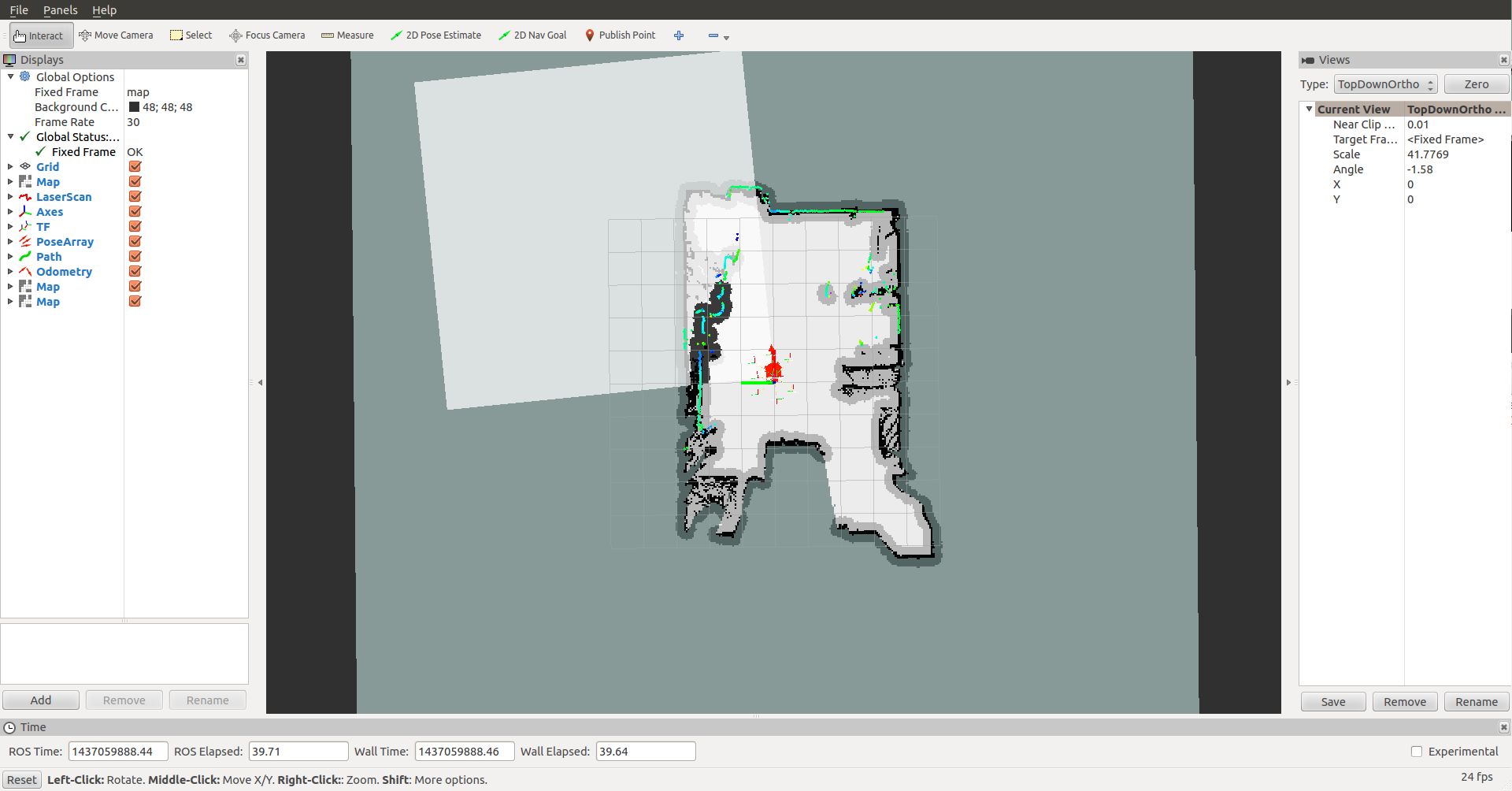
I'm trying to get move_base to work on my robot. I am using dwa_local_planner and global_planner. When I give the robot nav goals it keeps telling me that none of the points of the global plan were in the local costmap and free. When I added the global and local costmaps to RVIZ, I got the image below. The white square to the upper left is the local costmap. It should be centered around the robot and I don't know why it is not. Any ideas why this is?
costmap_common_params.yaml
obstacle_range: 2.5
raytrace_range: 3.0
footprint: [[0.6096, -0.5969], [-0.6096, -0.5969], [-0.6096, 0.5969], [0.6096, 0.5969]]
inflation_radius: 0.25
observation_sources: front_scan kinect #rear_scan
front_scan: {topic: scan, sensor_frame: front_laser, observation_persistence: 0.0, expected_update_rate: 0.1, data_type: LaserScan, clearing: true, marking: true, obstacle_range: 2.5, raytrace_range: 3.0, inf_is_valid: false}
kinect: {topic: scan, sensor_frame: "", observation_persistence: 0.0, expected_update_rate: 0.0, data_type: LaserScan, clearing: true, marking: true, obstacle_range: 2.5, raytrace_range: 3.0, inf_is_valid: false}
#rear_scan: {topic: scan, sensor_frame: rear_laser, observation_persistence: 0.0, expected_update_rate: 0.1, data_type: LaserScan, clearing: true, marking: true, obstacle_range: 2.5, raytrace_range: 3.0, inf_is_valid: false}
local_costmap_params.yaml
local_costmap:
#Coordinate frame and tf parameters
global_frame: /odom
robot_base_frame: base_footprint
transform_tolerance: 0.2
#Rate parameters
update_frequency: 10.0
publish_frequency: 10.0
#Map management parameters
static_map: false
rolling_window: true
width:4.0
height:4.0
resolution:0.05
origin_x:0.0
origin_y:0.0
EDIT: I've added the results of rosparam get /move_base/local_costmap/. I have used a variety of origin_x and origin_y values but that does nothing at all. Is it possible that this is a problem arising from ros converting the old format params to the new plugin style?
footprint: '[[0.6096,-0.5969],[-0.6096,-0.5969],[-0.6096,0.5969],[0.6096,0.5969]]'
footprint_padding: 0.01
global_frame: /odom
height: 10
inflation_layer: {cost_scaling_factor: 10.0, enabled: true, inflation_radius: 0.25}
obstacle_layer:
combination_method: 1
enabled: true
front_scan: {clearing: true, data_type: LaserScan, expected_update_rate: 0.1, inf_is_valid: false,
marking: true, observation_persistence: 0.0, obstacle_range: 2.5, raytrace_range: 3.0,
sensor_frame: front_laser, topic: scan}
kinect: {clearing: true, data_type: LaserScan, expected_update_rate: 0.0, inf_is_valid: false,
marking: true, observation_persistence: 0.0, obstacle_range: 2.5, raytrace_range: 3.0,
sensor_frame: '', topic: kinect_scan}
max_obstacle_height: 2.0
observation_sources: front_scan kinect
obstacle_range: 2.5
raytrace_range: 3.0
obstacle_layer_footprint: {enabled: true}
origin_x: 0.0
origin_y: 0.0
plugins:
- {name: obstacle_layer, type: 'costmap_2d::ObstacleLayer'}
- {name: inflation_layer, type: 'costmap_2d::InflationLayer'}
publish_frequency: 10.0
resolution: 0.05
robot_base_frame: base_footprint
robot_radius: 0.46
rolling_window: true width:4.0 height:4.0 resolution:0.05 origin_x:-2.0 origin_y:-2.0
static_map: false
transform_tolerance: 0.2
update_frequency: 10.0
width: 10
