
SLAM Gmapping does not get a map
Hi there,
I am using SLAM Gmapping with a hokuyo lidar and I want to visualize an occupancy grid in rviz but I keep getting this warning
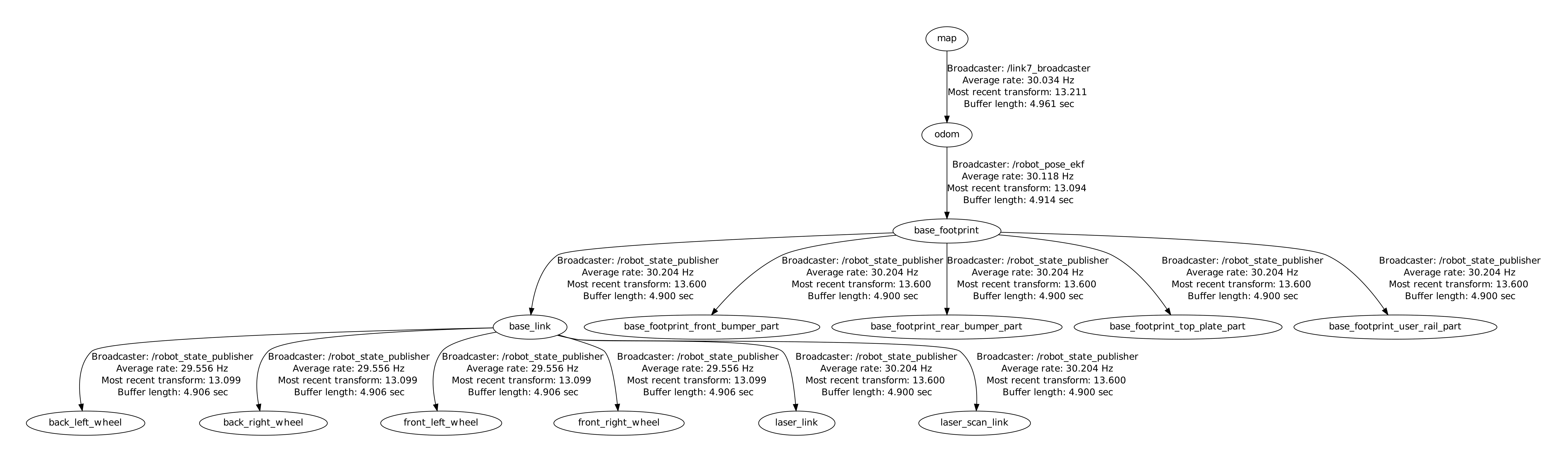
My tf tree is shown here:
Am I missing something here ? My launch file for gmapping is here.
Why can't i visualize my occupancy grid in rviz ?
My output from RQT console set to DEBUG level for slam gmapping says: When my laser topic is /scan why is slam gmapping adding messages to laser_front ? How can I fix this error ?
Please advise. P.S. I am working on ROS Hydro.

do you see hokuyo scan messages on $ rostopic echo /scan ?
No and I know the reason I guess. My output from Debugging level of rqt console says:
From RQT Console set to DEBUG is here
So the problem is that the frame_id is being set to laser_front but in rviz i only have a laser_link or laser_scan_link frames as u can see in my tf tree. How can fix this ?
change your frame_id in hokuyo launch file as laser_front to laser_link
Hey osmancns, I am not using a separate hokuyo node. I just added the hokuyo description into my robot urdf file and in there, there is nothing called a laser_front because this frame name does not show up in tf tree. Any other ideas ?
you can review this simulate https://github.com/dawonn/ros-pioneer3at
I did see this one before but I still do not understand. In the launch file there is nothing about the laser frame_id and yet for my case, it is picking up the frame_id incorrectly as laser_front. I just dont get what part of the code is setting this incorrect frame id ?