
Path Planning using Occupancy Grid Map [ROS Hydro]
Hi guys,
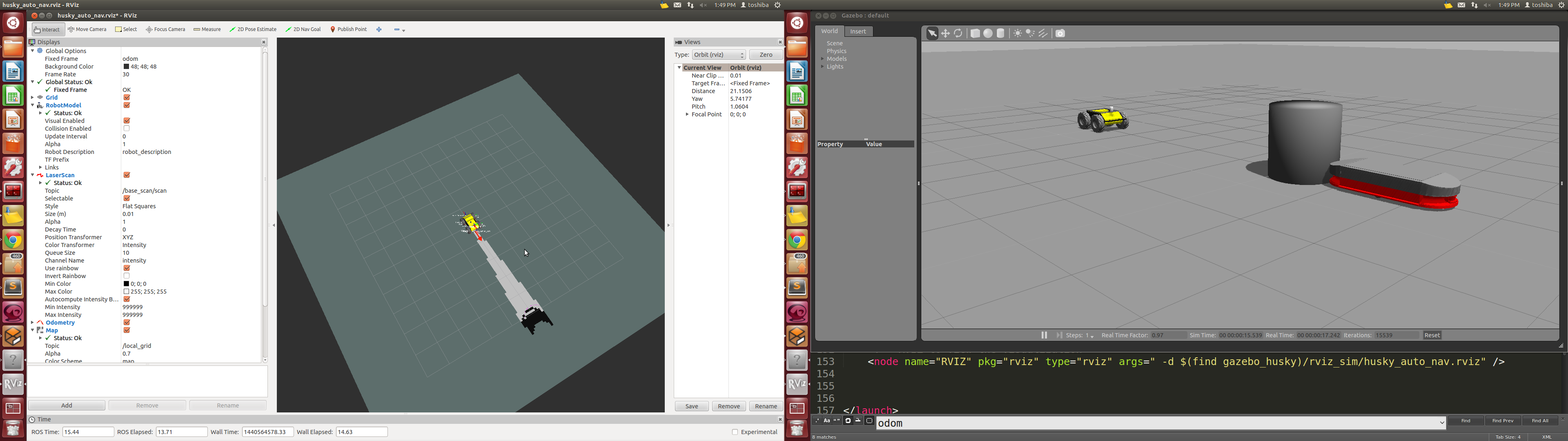
I have setup a simulation using ROS Hydro. What I have so far is an Occupancy Grid Map that is dynamically updating as the robot moves (attached screen cap). Now I have to write a path planner like A/D etc that takes in this Occupancy Map as an input and generates a path in the free space of this OGM from a pre-defined/current position to pre-defined goal position. Any suggestions how I can achieve this ?
add a comment
