
Problem when using navigation stack in the rviz
Hello everybody, I'm trying to using navigation stack in the rviz. I have the launch file looks like this:
<launch>
<param name="/use_sim_time" value="false" />
<arg name="urdf_file" default="$(find xacro)/xacro.py '$(find smartcar_description)/urdf/smartcar.urdf.xacro'" />
<arg name="gui" default="false" />
<param name="robot_description" command="$(arg urdf_file)" />
<param name="use_gui" value="$(arg gui)"/>
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<rosparam command="delete" param="/arbotix" />
<rosparam file="$(find smartcar_description)/config/smartcar_arbotix.yaml" command="load" />
<param name="sim" value="true"/>
</node>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" >
</node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
</node>
<node name="map_server" pkg="map_server" type="map_server" args="$(find rbx1_nav)/maps/test_map.yaml"/>
<include file="$(find rbx1_nav)/launch/fake_move_base_amcl.launch" />
<node pkg="fake_localization" type="fake_localization" name="fake_localization" clear_params="true" output="screen">
<remap from="base_pose_ground_truth" to="odom" />
<param name="global_frame_id" value="map" />
<param name="base_frame_id" value="base_link" />
</node>
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find rbx1_nav)/nav.rviz" />
</launch>
My fake_move_base_amcl.launch file looks like this:
<launch>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" clear_params="true" output="screen">
<rosparam file="$(find rbx1_nav)/config/fake/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find rbx1_nav)/config/fake/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rbx1_nav)/config/fake/local_costmap_params.yaml" command="load" />
<rosparam file="$(find rbx1_nav)/config/fake/global_costmap_params.yaml" command="load" />
<rosparam file="$(find rbx1_nav)/config/fake/base_local_planner_params.yaml" command="load" />
</node>
</launch>
when I run the launch file,there are map and RobotModel.But no autonomous navigation. The Warning as following:
[INFO] [WallTime: 1441624427.388872] Started DiffController (base_controller). Geometry: 0.26m wide, 4100.0 ticks/m.
process[rviz-8]: started with pid [16162]
[ WARN] [1441624432.486553111]: Waiting on transform from base_footprint to map to become available before running costmap, tf error:
[ WARN] [1441624437.562957259]: Waiting on transform from base_footprint to map to become available before running costmap, tf error:
Thank you for any kind of help..
the tf tree looks like:
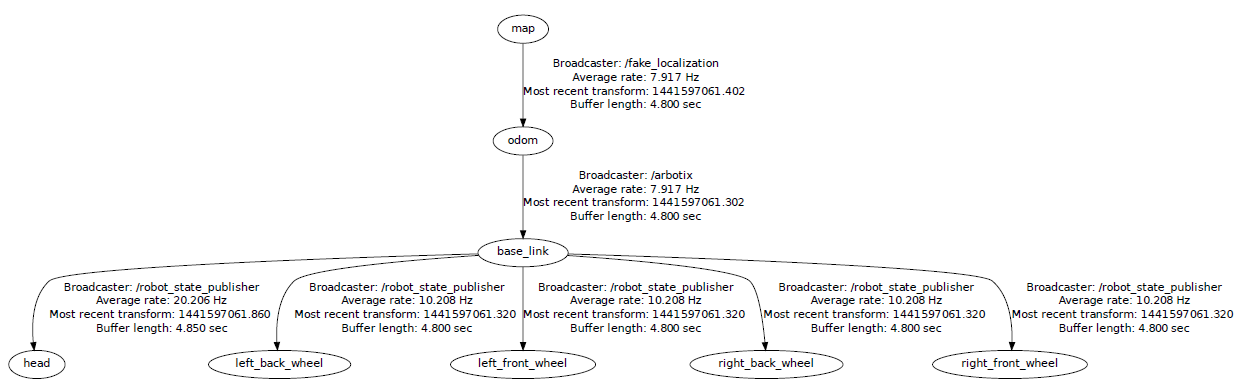


What does the transform tree look like between map and base_footprint?
@David Lu I have uploaded the image of tf tree