
Global path not changing with new obstacles !
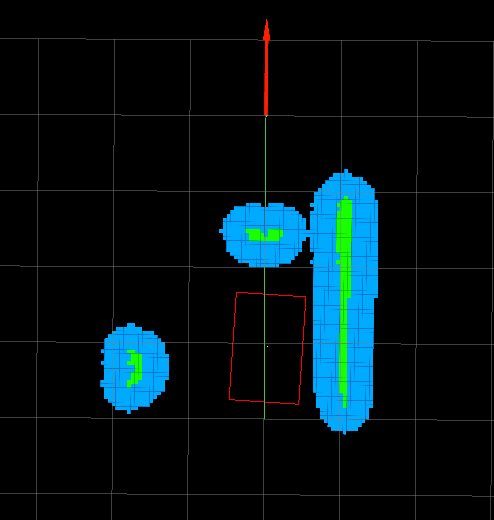
hello I'm using move_base to generate paths based on a map. The below rviz screenshot sums up my problem quite well: essentially as the new (middle) obstacle appeared in my LiDAR's view, the global path (in green) doesn't update. It seems properly inflated (blue).
my config files (DWA) : https://github.com/husky/husky/tree/i...
ı tried;
planner_frequency: 1.0
static_map : true
So what happens is that move_base keeps going onto the global path until it arrives too close to the obstacle, and then it backs up (recovery mode).
Any ideas why my global path isn't changing?
add a comment
