RTABMAP-ROS point cloud not created (robot mapping use case)
Hi,
I'm quite new to RTABMAP-ROS, and trying to use it on our turtlebot. Using Ros Hydro, rtabmap_ros version 0.8.12 (from binaries).
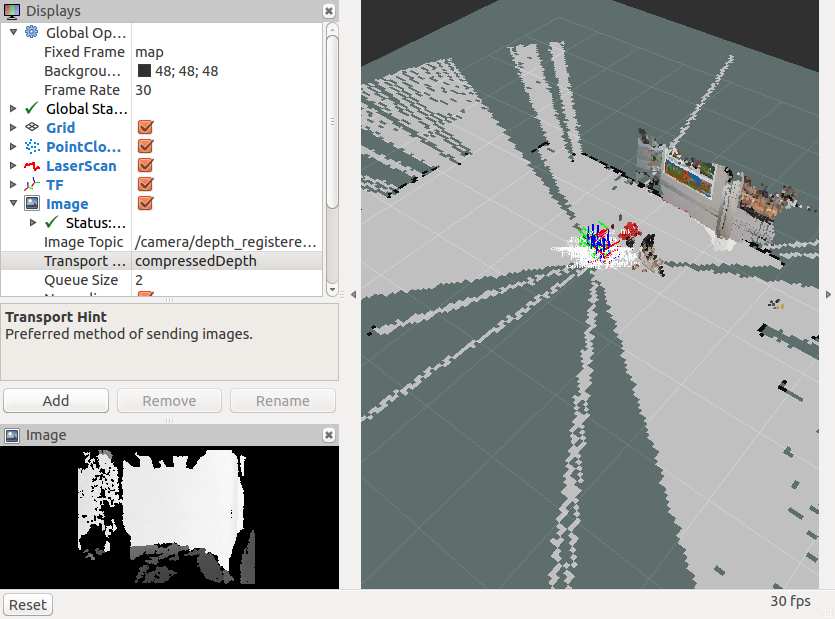
I noticed when the Kinect is connected to my workstation, the RGB-D SLAM works fine, as in this rosbag:
https://drive.google.com/file/d/0B0g4...
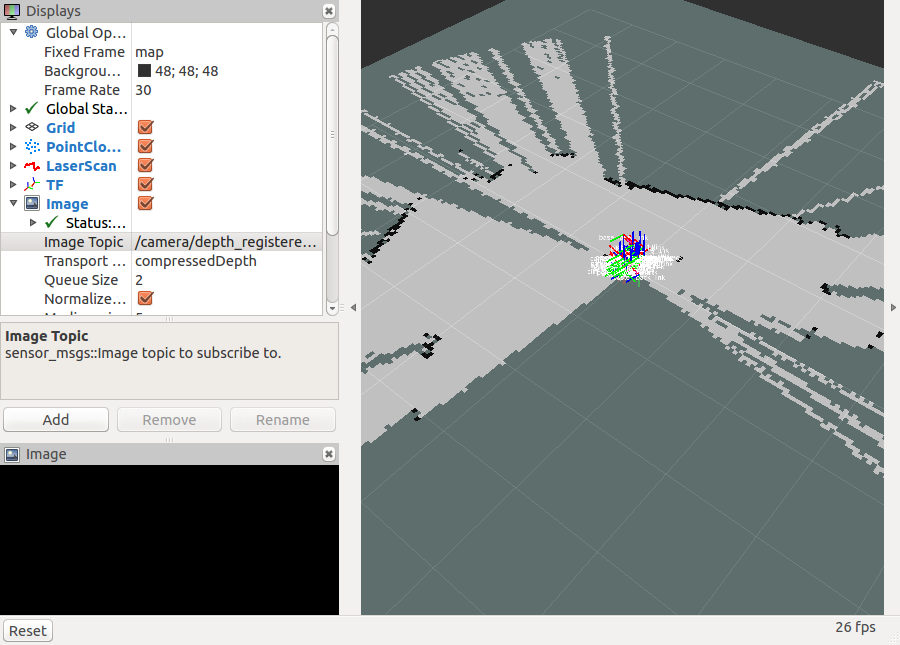
Whereas, with the usual connection to the netbook on the turtlebot, only the 2D map is produced and no point cloud. Rosbag for identical setting for this:
https://drive.google.com/file/d/0B0g4...
I'm using the demo_robot_mapping.launch (modified to subscribe to compressed image topics).
What's missing? Is it related to TF?
Thanks!
add a comment