
Gazebo doesn't give the option for saving a world

Hello, ROS Community!
I use Jade distribution, Gazebo 5.1.0 version, Ubuntu 14.04.3 LTS
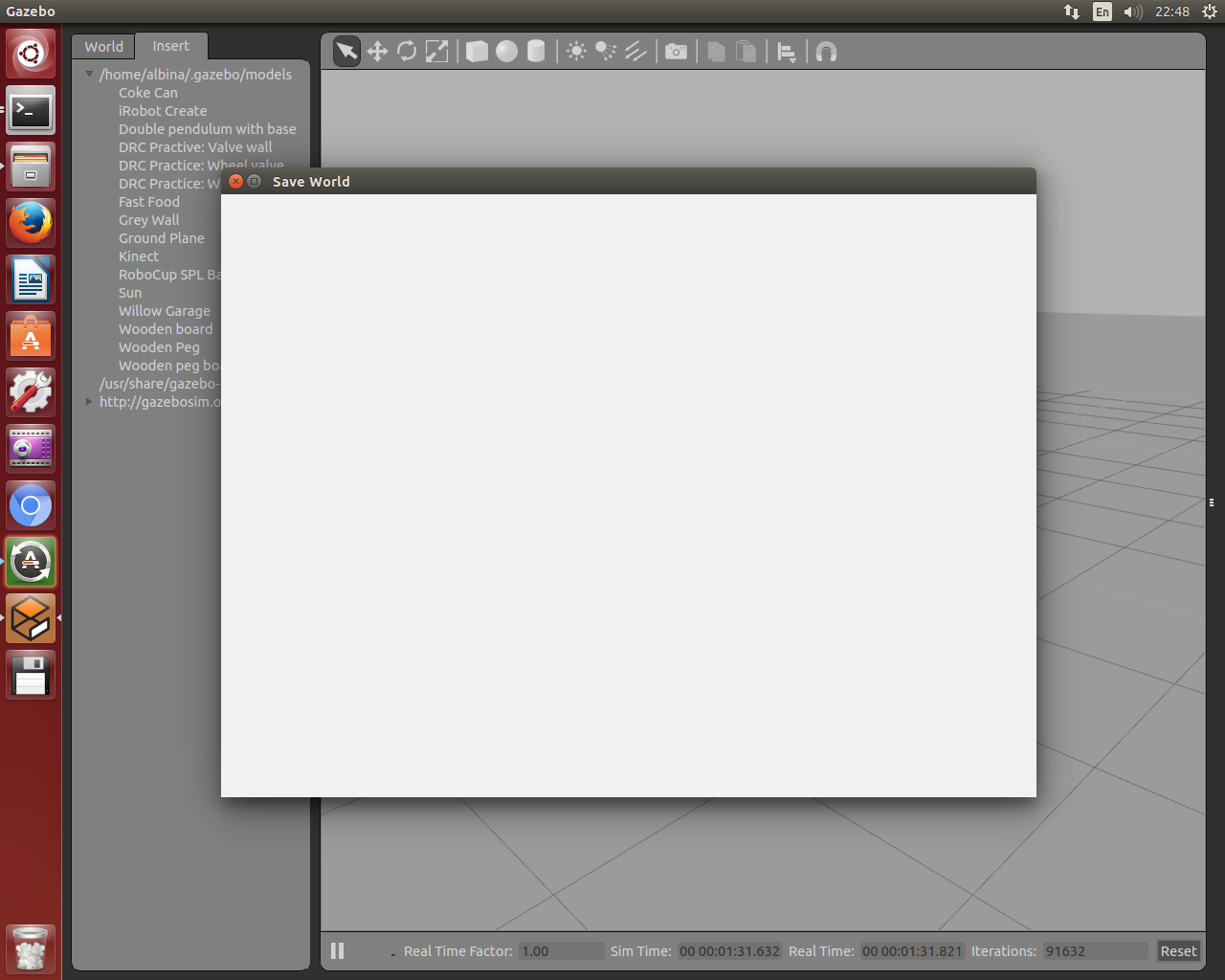
When I add some objects Insert tab of Gazebo and try to save the world after, I cant do it. The empty window Save World popped up without any options.
Yesterday, I was struggling with this problem too. When I was stopping gazebo process by terminal or GUI, the world objects were deleted too. It means gazebo was launched (rosrun gazebo_ros gazebo) with empty scene every times.
I decided to update packages by sudo apt-get update command, because I suggested the bug can belong to ubuntu. So, I updated them successfully.
Today, I get the empty Save World window again, but objects are saved even when I stop gazebo process with this notification:
albina@alb91:~/catkin_ws/src$ rosrun gazebo_ros gazebo
/opt/ros/jade/lib/gazebo_ros/gazebo: 30: kill: invalid signal number or name: SIGINT


I had some problems with gazebo 5 gui when I was trying to import some images for the building editor. So I moved to gazebo6.
Thank you )