
Navfn plans path through obstacle?
Hi all,
Please refer to the image below:
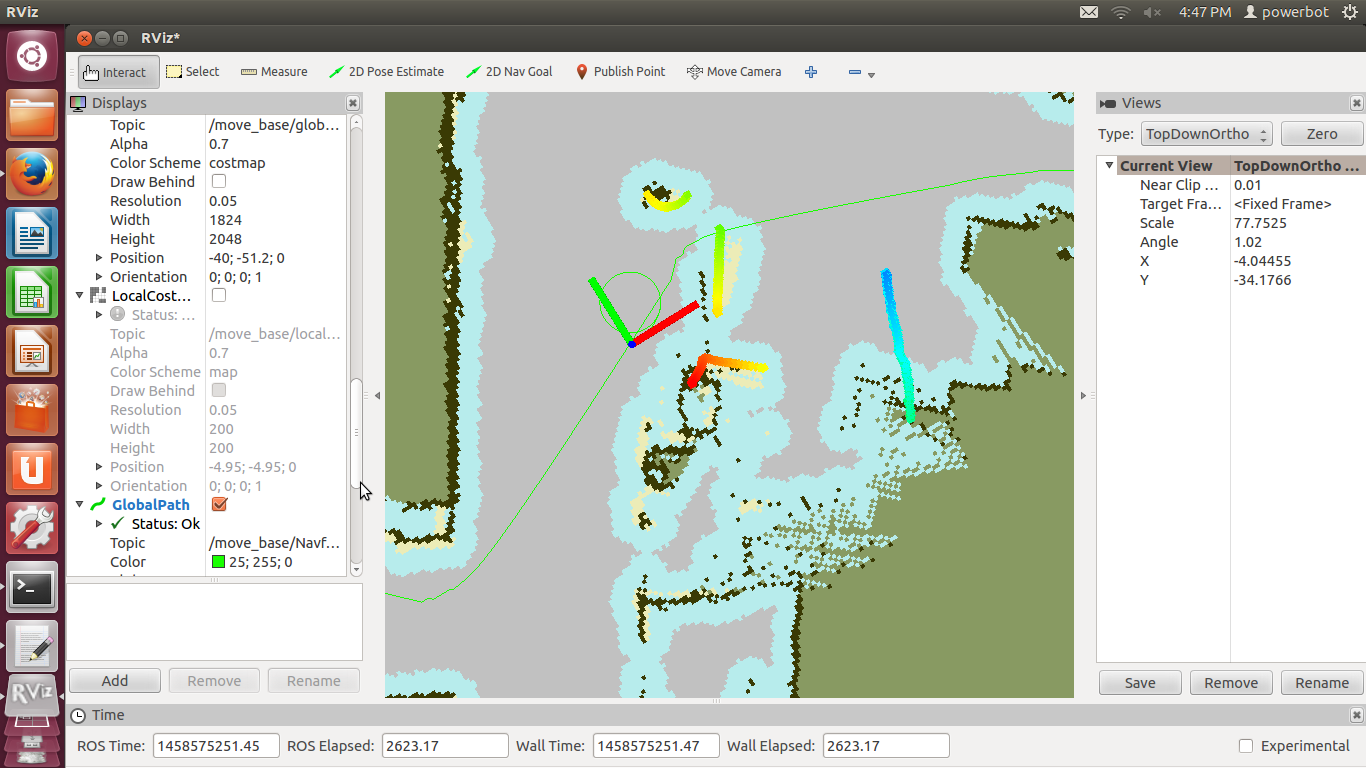
The circular path is the local path while the path passing through the global costmap is the global path. Any ideas why the global path is passing through the global costmap? I am using move_base with navfn and trajectory rollout.
Thanks
add a comment
